|
|
|
DCC profiktól (nem csak) profiknak
|
Témaindító: Frankye, idő: Jan 23, 2013
Témakörök:
|
|
|
(#13061) Frankye hozzászólása
|
Válasz •
|
Jan 23, 2013 |

|
|
|
(#13076) etwg hozzászólása
|
Válasz •
|
Jan 23, 2013 |
|
Kösz Frankye.
Akkor hadd folytassuk itt (legalábbis) az elektronikai részt.
Itt van egy eljárás, hogy lehet a BEMF-et mérni.
Back EMF
Itt meg ugyanaz kezdöknek, ahogy azt Ausztráliában tanitja a virtuális fizikatanár:
Iskolai BackEMF |
|
(#13092) piltdownman válasza etwg hozzászólására (#13076)
|
Válasz •
|
Jan 24, 2013 |
|
Összelapátoltam egy tesztpályát,mivel kirúgtak a nagyszobából és nem engedték hogy egy ajtóra szereljem fel.
Sajnos akármit csináltam,egy DC tápról hajtva mindkét mozdony áramfelvételében a sebességtől függően 1-10ms szakadások voltak,hol itt állt meg,hol ott,egyértelműen a sinek állapota miatt.Most el fogod törni a kezem,de lesmirgliztem,úgyis kuka lesz a vége.
A linkeket reggel megnézem, és többi dologra is visszatérek.
|
|
|
|
(#13093) etwg válasza piltdownman hozzászólására (#13092)
|
Válasz •
|
Jan 24, 2013 |
|
Tul tudományos állsz a dologhoz - ennyi müszer még sok fejlesztö laborjában sincs  .
Tegnap végignéztem a CT Elektronics dekodérjeinek a jellemzöit, és csak megerösitett abban, hogy sokan sok helyen tévhiteket terjesztenek.
•Niederfrequente Motoransteuerung von 30 bis150 Hz wählbar
A klasszikus motorokra - mint a te képeden is van - a PWM frekije jóval 1 kHz alatt van.
A multkor majdnem kizavartak egy forumról, mert azt mondtam az egyik delikvensnek, aki 20 kHz-en felüli PWM-mel kivánta hajtani a motorokat, hogy azok nem denevérek, és valoszinü meg sem hallják azt az ultrahangot 
A magas frekis PWM kizárolag a harangarmaturáju motorokra jó. |
|
(#13097) csíkosháTTú válasza etwg hozzászólására (#13093)
|
Válasz •
|
Jan 24, 2013 |
|
Szia Eugen!
Ez, amit néztél a Tran dekódereknél, ez a CV9-es érték! De ez nem a motorra jutó PWM jel ütemfrekvenciáját határozza meg (az 10kHz nagyságrendű), hanem a backEMF méréshez szükséges kioltás frekvenciáját! Nem csak alacsony érétkre lehet beállítani, hanem kifejezetten magasra is (gyárilag 134, ami cca. 16kHz), és vannak olyan régi Fleischmann dobmotorok, amik még ugyan rövidnadrágban látták Helmuth Kohlt  , de még ennél is magasabb értéken - CV9=147 - muzsikálnak szépen.
(Lassan befejezem kézikönyvet, majd küldöm! Csak egy-két dolgot még ki kell próbálnom, mert kiegészítem ezzel-azzal:-  ) |
|
(#13098) csíkosháTTú válasza piltdownman hozzászólására (#13092)
|
Válasz •
|
Jan 24, 2013 |
|
"...hol itt állt meg,hol ott,egyértelműen a sinek állapota miatt."
Meg a kerekek, és az áramszedő lamellák állapota miatt is. Ott is lehet ám kosz! Meg az is lehet a baj, ha a csatlórudas modellek kerekeinek szögbeállítása nem jó! A képen a klasszikus, hosszú csigával minden tengelyen hajtott BTTB konstrukció van. Ha csak az egyik kerékpár "előrébb, vagy hátrébb van" a csigán, akkor a merev csatlórúd miatt a modell billegni fog a pályán. Ilyenkor is lehetnek szép "áramszünetek" 
Mindig mondtam, és vallom most is: ha egy modell analógban nincs rendben, azon a legjobb digitális vezérlés sem segít. Az analóg tud jól > kevésbé jól > közepesen > rosszul > nagyon rosszul > sehogy sem működni. A digitális, mint a nevéből is kitűnik, csak kétféle állapotot ismer: jól működik > nem működik (0, vagy 1 ) |
|
(#13100) etwg válasza csíkosháTTú hozzászólására (#13097)
|
Válasz •
|
Jan 24, 2013 |
|
Én csak azt szajkozom, amit a gyártó állit (szerintem helyesen):
Der DCX75 bietet hochfrequente 16kHz oder 32kHz Motoransteuerung für Faulhabermotoren. Alternativ stehen auch stufenlos einstellbare 30-150 Hz für traditionelle Motoren zur Verfügung.
Azaz a DCX75 alapban nagyfrekvenciás motorvezérést kinál, 16kHz vagy 32kHz-re a Faulhaber (harangaratmaturáju motor - megj.) motorok számára.
Rendelkezésre áll azonban a szabadon beállitható alacsonyfrekvenciás, 30-150Hz-es, vezérlés is a tradicionális motorok számára.
(Privat üzenet ment). |
|
(#13103) Frankye válasza csíkosháTTú hozzászólására (#13098)
|
Válasz •
|
Jan 24, 2013 |
|
Ez nagyon jó:
Idézet:
„A digitális, mint a nevéből is kitűnik, csak kétféle állapotot ismer: jól működik > nem működik (0, vagy 1)”  |
|
(#13172) piltdownman válasza etwg hozzászólására (#13093)
|
Válasz •
|
Jan 26, 2013 |
|
Javaslatodra szétbontva akkor először a motorokról.
A többfázisu motorok (amiröl már irtunk) megbuktak a modellvasuton a körülményes elektronika miatt.
Ez tuti,hogy nem stimmel.A DC hídvezérléshez képest pl. a háromfázisú plusz egy ágat jelentene és plusz egy kontroller lábat.Az aszinkron motor fordulatszáma követi a meghajtás frekvenciáját,a "növekvő frekvenciához-növekvő amplitudó" követelmény sw-ből is megoldható volt,a mostani procik között sok van dedikált 3 PWM-mes + szorzó utasítás.(100-200W-os hajtások körül sertepertéltem egy darabig.)
Inkább az lehet az ok,ahogy utaltál a mai állandó mágnesekre,egy adott térfogatban nagyobb nyomatékot tud kifejteni egy állandó mágnessel rendelkező motor mint egy anélküli többfázisú.
Továbbra sem értem,miért nem használnak valamilyen kefe nélküli motort?
Darabszám miatti ár?
Köszönöm a a "Back EMF" linket,abszolút jó volt a tipp -ha szabadna lottószámokat is-,az első képről beugrott, hogy a mondjuk 10kHz-es PWM-t is meg kell szaggatni, rögtön lesz mérhető bemf.
(Az "Iskolai BackEFM"-et is átolvasgatom,10 napig oszcilloszkóp mentes környezetben leszek.)
Tul tudományos állsz a dologhoz - ennyi müszer még sok fejlesztö laborjában sincs .
Sajnos muszáj kicsit elméletileg átgondolni a dolgokat és a mérnök mér.
Máris beláttam balgaságomat,nem tudok öntanuló módot csinálni,mert a fordulatszámot nem tudom megmérni bemf-ből megfelelő pontossággal és kódtárcsát, proximity sensor-t stb. sem tudok felraki.Gondoltam megpróbálok a talpfák figyelésére reflexiós érzékelőt ragasztani a mozdonyra aljára és 433MHz-n átvinni az infót,sajnos kis sebességnél "évekig" kéne várni a pulzusra.
Ráadásul az én mozdonyaim sinen meg sem nyikkanak 4VDC-ig,úgy hogy az átviteli függvény (ugrásfesz. - fordulatszám)sem lineáris,ezt tanultam,de holt zónás szabályozást csak hírből hallottam.
Egyébként is baj van a kis sebességgel.Ha kb. 60ms-ként adtam 10ms-ig fesz.-t a motorra,akkor le tudtam menni kb 0,5m/90sec sebességre.Persze rángat,mint a stepping motor,de van is nyomatéka,szemben 6ms/1ms PWM-mel pedig a DC átlag egyforma.
Úgy vélem,hogy nem fog rángatni,ha a 10ms meghajtás nem sima impulzus,hanem pl.háromszög vagy félperiódus szinusz.Mivel híányos a műszerparkom ezt generátort össze kell dobnom.
Modern cuccoknál mennyire lehet lemenni a sebességgel?
Hány voltnál megy szépen?
Észreveszi a mozdony,hogy vagonok vannak rákötve?
Hallható a PWM? Nálam olyan zajos a motor,hogy nem hallom a zúgást.
Pontosan nem tudom, nem épitettem meg ezt a kapcsolást, de valoszinü, hogy a külsö eröltetett fékezés miatt oldották meg igy a dolgot. A uC-nek open kollektoros a kimenete,
Az "eröltetett fékezés"-ről néhány szót,ha lehetne.Eszik vagy isszák?
Ha ezt elmagyarázod,talán megértem az említett ellenállások szerepét.
(PIC16f84-nek csak egy open kollektoros lába van.Ez a 3.kivezetés(RA4),a kapcsolásban bemenetre van fordítva,a tápfesz bekapcsolása utáni késletetést végez.)
|
|
(#13173) piltdownman válasza Frankye hozzászólására (#13061)
|
Válasz •
|
Jan 26, 2013 |
|
T.Moderátor,kösz.a lehetőséget.
A hangról.
Ehhez elengedhetetlen lenne a füled méretarányos kicsinyitése is - ha ez sikerül, akkor egyböl megjelenik a doppler effektus a mai mozdonyokban is.
Ehhez nem a szobát kéne inkább nagyobb sűrűségű gázzal feltölteni?  Pontosan ez a lényeg, a primitivebb dekoderek 8 bites hanggal sajnos nagyon szuszognak, hiányzik a dinamika és hosszutávon nagyon fárasztó a hang.
Pontosan ez a lényeg, a primitivebb dekoderek 8 bites hanggal sajnos nagyon szuszognak, hiányzik a dinamika és hosszutávon nagyon fárasztó a hang.
A szuszogást nem értem és persze sok a szubjektivitás.
A fárasztó gépi hang ellen álvéletlen generátorral FM-ben kéne a hangot modulálni.
A kis méretű hangszóró nem tudhat többet kb.200Hz-2kHz nél,max.1-2W-os lehet,nincs dinamikája,ezen nem segít ha a mintavételezés nagyobb bites,a sustorgás miatt érdemes 10kHz fölé vinni.
A fülhöz szorított hangszóró más eset,ott nem kell nagy hangnyomás,lehet könnyű membránt használni,van is mély hang.
Az igaz,hogy vannak kontrollerek akár 1Mbyte flash memóriával,de ezek nagy lábszámú jószágok,ahogy említetted itt csak kis méretű kontrollerek jöhetnek szóba kb. 32k memóriával.
Ha csak 10kHz-val mintavételezek,1perc=60sec hosszúságú hanghoz 60*10.000=0,6Msample kell,8 bit esetén ez 0,6Mbyte,erre valók a kis soros memóriák.
Pl. a W25P32 4Mbyte-os,8 kivezetéssel, kb.5x5x1mm méretben.
Arra nem gondoltam,hogy doppleres vonatfüttyöt vettek fel.Én a "Megy a gőzős..."-t is be fogom tölteni a memóriába az "esu" hangfile mellett,ha valaki segít szétszedni.
Ez lesz a project utolsó lépése,mert csak át kell nyomtatni egy meglévő cuccot.
|
|
(#13174) piltdownman válasza csíkosháTTú hozzászólására (#13097)
|
Válasz •
|
Jan 26, 2013 |
|
DCC-s dolgok.
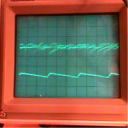
A számitásaid kb. stimmelnek ha csupán 1-es bitek lennének a kodban akkor az egyes periodusok 58-64 us között lennének, ami kb. 17 kHz-es frekvenciát jelentene.
A fele:8,86kHz,ez a maximális pillanatnyi frekvencia.
Vagy félreértem?
Idézet:
„
In a "1" bit, the first and last part of a bit shall have the same duration, and that duration shall nominally be 58 microseconds2, giving the bit a total duration of 116
microseconds. ...
”
Ez, amit néztél a Tran dekódereknél, ez a CV9-es érték! De ez nem a motorra jutó PWM jel ütemfrekvenciáját határozza meg (az 10kHz nagyságrendű), hanem a backEMF méréshez szükséges kioltás frekvenciáját! Nem csak alacsony érétkre lehet beállítani, hanem
kifejezetten...
"
Ezt tapasztalatból tudod vagy részletezve van valahol?
Az "RP 9.2.2" szabvány 90. szakaszában
Idézet:
„
Configuration Variable 9 Total PWM Period
The value of CV#9 sets the nominal PWM period at the decoder output and therefore the frequency is proportional to the reciprocal of the value. The recommend formula for PWM period should be: PWM period (uS) = (131 + MANTISSA x 4)x 2 EXP ,Where MANTISSA is in bits 0-4 bits of CV#9 (low order) and EXP is bits 5-7 for CV#9.
”
de még ennél is magasabb értéken - CV9=147 - muzsikálnak szépen.
147= h'93'=b'10010011'
MANTISSA: b'10011' = d'19'
EXP: b'100'= d'4'
PWM period(us) = (131 + 19*4) x 2exp4 = (131+76)x16=207x16=3312us=3,312ms - 301Hz
Hol rontom el?
|
|
(#13176) etwg válasza piltdownman hozzászólására (#13172)
|
Válasz •
|
Jan 26, 2013 |
|
Probáld a jövöben egy kicsit tagolni a témát (egy hsz.be ne rakj egyszerre egy tucatnyi kérdést, mert a választott forma miatt nehéz válaszolni. Kösz.
A többfázisu (kefenélküli stb.) motorok ott buknak meg, hogy extra elektronika/vezérlés kell hozzájuk, a mai modellvasutak meg eleve univerzálisak, azaz, ha kiveszed belölük a dekodért, akkor sima egyenárammal is menniük kell, és szabályozni is tudni kell. Ez zárja ki többek között az ilyen konstrukciokat (meg az elterjedtség hiánya miatt az áruk is).
A régebbi modellmozdonyok többsége sem nyikkan meg 4 V alatt, a speciális motorokkal szerelt mozdonyok még ettöl is rosszabbak lennének, hiszen a fedélzeti elektronika meghajtásáház is legalább ennyi kell, és csak ezután indulhat a szerkezet. Az egyik ilyen hirhedt konstrukció, ha jól emlékszem 7-8 V-nál indult - és 12 V-ig ment.
Azaz a szabályozhatsági tartomány 12/7= 1,7.
A jobb sima DC motorral szerelt mozdony ettöl majdnem nagyságrenddel többet tud: 12/2=6.
Egy jol beállitott PWM meghajtással meg akár 200-as szabályozási tényezöt is el lehet érni, ezért még a legvacakabb DCC meghajtásban is 14 lépésben szabályozzák a mozgást.
A szabályozási tényezö az egyik legfontosabb jellemzö, hiszen ez minösiti a modellt meg a meghajtó elektronikát. (nincs bakkecske ugrás és tolatásnál sem lököd el méterekre a könnyü vagonokat).
A mai modern mozdonyok általában 2 V-töl indulnak.
PWM-mel ki lehet terjeszteni a tartományt.
Én az egyik kisérletemben már nagyon régen 4m/h sebességet tudtam elérni Zeuke BR81es gyári modellel.
A modell egy kicsit bugott, de folyamatosan ment. Természetesen ilyen lassu menetre alig van szükség, de jo ha az ember ismeri a határokat.
A jelformákröl szóló értekezésed sajnos téves. A motorok meghajtásában az impulzus él jelentös szerepet játszik, hiszen az küzdi le a sztatikus veszteséget (kefeveszteség, mechanikus akadályt stb. amihez sok energia kell.). Ha 3szög stb. jellel probálkozol, akkor ezek az átmeneti jelenségek meghosszabodnak, azaz rontják a PWM-hez képest a szabályozást. A PWM.nél a helyes frekvencia megválasztása többet segit.
Nyilván, hogy észreveszi a mozdony (még PWM-ben is), hogy terhelés éri (vagonok, emelkedö), pontosan erre szolgál az EMF bevitele a szabályozásba. A mellékelt rajzon az általam tökéletesitett analog meghajtó egység, amiben 2 áramkör is figyeli a mozdony müködését. Egy AC visszacsatolásu kör az ismétlödö nagyobb frekvenciájú terhelést hivatott komnzálni, a másik meg a vonatra akasztott, illetve pálya okozta DC terhelést. Ez eddig (nem kis áron), de nagyon jol kezeli a mozdonymotort. Ha az ember elszorakozik vele, akkor teljesen stabil futást lehet elérni (érzéketlen a terhelésre). A hátránya, hogy minden beállitás csak az adott mozdonyra optimális, ezért jo a DCC, mert ott a dekodér mindig csak egy mozdonyt kezel, igy a beállitások egyszerübbbek. Persze az sem nagyon célszerü, hogy a mozdony ézéketlenné váljon a terhelésre.
A PWM hallható, hiszen sem a motor mechanikája, sem a tekercsei nem éppen ebböl a szempontból lettek tervezve, igy azok bugnak, rezegenek, sipolnak stb. Ez nem gond. A modernebb konstrukciokban kevésbé, de ennek ellenére nem vagyok a hive a PWM freki felvitelének 1 kHz fölé a klasszikus motoroknál. Ilyenkor a méréseim szerint is, jelentösen elvész a PWM azon hatása, amiröl fentebb irtam, és a motorra adott PWM jel átmegy sima energiaátvitelbe, és magán a motoron integrálodik, azaz a motor elnyeli az impulzusokat, amik kellenének a veszteségek leküzdésére. Menni megy, de szuper lassú menet pl. már nem állitható be. (nagyban függ a motor konstrukciojától).
Az eröltetett fékezés az, amikor a DCC mozdonyt nem a kezelögombbal fékezed, hanem a valami más. Pl. egy jelzö elött automatikusan fékez, ezt valahogy tudtára kell adni a mozdonynak. (s csak annak az egynek, amelyik a jelzö felé megy).
|
|
|
|
(#13177) etwg válasza piltdownman hozzászólására (#13173)
|
Válasz •
|
Jan 26, 2013 |
|
A szuszogás.
Vagy 25 éve, amikor megjelent az elsö sampling elven müködö billenytüs hangszer. Sok pénzért megvettem mert a demo hangok gyönyörüek voltak, és csak otthon derült ki, hogy a ADC benne csupán, ha jól emlékszem 10 bites volt. Gyakorlatilag használhatatlan lett szolo hangszerként, (csak a beglajtot lehetett vele játszani).
A következö generácio már 16 bites volt, és ez nagyon hallható.
Hasonlo a jelenség a mozdonyokban is. A 8 bites hang az elsö hallásra jonak tünik, de késöbb nagyon fárasztó a szuszogás. Vagy nem hallod (elnyeli a környezeti hangzavar), akkor feltekered a hangeröt. Ez meg azt eredményezi, hogy visit a mozdony. Szerintem a 8 bit kevés egy jo hanghoz. Nagyon hasonlit arra az esetre amikor pl. egy Szokol rádio hangszorjából szeretnél kicsikarni nagyobb hangeröt.
Egy modern dekodérban kb. 16 Mb hangtár van, ami max. kb 200 sec hangjelet tud tárolni. (Nyilván függ a felbontástól vagy a mintavételezéstöl, valamint a sávszelességtöl - 0,2 - 2 kHz a tipikus tartomány).
SL 75 |
|
(#13183) csíkosháTTú válasza piltdownman hozzászólására (#13174)
|
Válasz •
|
Jan 26, 2013 |
|
Az NMRA nem határozza meg, hogy a motor szabályzását hogyan oldod meg a dekóderen belül. A Tran, és a jobb dekóderek szabályzó körének paraméterei taníthatóak. A Tran dekódrek esetében ezek közül az egyik ilyen CV a 9-es. Keresd meg a honlapomon az SL75 hangdekóder magyar használatiját a letöltések között, és meglátod.
Amúgy igen, tapasztalatból tudom, ment már át néhány ezer Tran dekóder a műhelyen |
|
(#13184) csíkosháTTú válasza piltdownman hozzászólására (#13173)
|
Válasz •
|
Jan 26, 2013 |
|
"A fárasztó gépi hang ellen álvéletlen generátorral FM-ben kéne a hangot modulálni."
Mint anno az MR-nél végzett hangtechnikus, vegyük úgy, hogy ezt nem olvastam
Nem lehet a közeledő/távolodó mozdony hangját modell körülmények között szimulálni, az eredmény siralmas lesz. Ugyanis nem azonos sem a tér (nyílt, modellben zárt), sem a tér nagysága (km hosszúságú pálya, vagy egy 3*1,5m-es asztal). Ezen kívül maga a "hangsugárzó" (mozdony vagy a modell) durván eltérő nagyságú, és a hangereje is nagyon eltérő lesz. Más a sebesség is, egy tolató mozdonynál gyakorlatilag elhanyagolható a doppler, míg egy 140-nel robogó IC-nél már nem! Modellüzemben a sevbességek között sincs akkora eltérés, mint a valóságban! hA egy modell 1cm/sec sebességgel halad, vagy mondjuk 20cm/sec sebességgel, akkor a nézőnél jelentkező doppler elhanyagolható. Nem tudod kiszámítani a néző/hallgató helyét sem, itt nem lesz ideális "sztereó szék!
A fenti okok miatt a dopplert jobb, ha hanyagoljuk egy modellhangnál.
Hogy aztán egy gép hang mennyire fárasztó, az meg szubjektív. Ha törekedünk az élethűségre, akkor nem kell feleslegesen manilulálni. Ha egyszer a műhely felé jársz, majd megmutatom a Tran pár hangját (Taurus, NoHAB, Big Boy) meg fogsz lepődni. Pedig "csak" 8bit/22,5kHz a mintevételezés. |
|
(#13196) piltdownman válasza etwg hozzászólására (#13176)
|
Válasz •
|
Jan 26, 2013 |
|
A többfázisu (kefenélküli stb.) motorok ott buknak meg, hogy extra elektronika/vezérlés kell hozzájuk, a mai modellvasutak meg eleve univerzálisak, azaz, ha kiveszed belölük a dekodért, akkor sima egyenárammal is menniük kell, és szabályozni is tudni kell. Ez zárja ki többek között az ilyen konstrukciokat (meg az elterjedtség hiánya miatt az áruk is).
Kösz.,így már OK.
Ebből következőleg szerintem az említett ellenállásoknak az alábbi a szerepük.A uC a 8. és 9. lábakon érzékeli,hogy nincsenek pulzusok és át kell mennie hagyományos üzembe,ehhez a 6. és 7. lábakat bemenetre fordítja,hogy R1 és R5 hatásos tudjon lenni valamint kinyitja Q8-t,hogy a híd működjön.Attól függően,hogy a "Track" pontokra milyen polaritással kerül táp áll be a híd,igy az irányváltás rendben van és a DC vezérlés is.
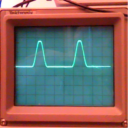
Jelformákkal kapcsolatban én máshogy közelítem,aztán kiderül.Meghajtottam a motort addig,amíg a max.áram folyt bele,azaz max nyomatékot adott.Ehhez kb.2ms széles pulzus kellett,amiből kb. 500us sec alatt futott fel az áram az RL viszonynak megfelelő (1-e-t/T0) függvény szerint,de akkor a motor még nem mozdult meg,kell még 1,5ms,amikor már ki lehetet a meghajtást kapcsolni.Szkópon jobban látni,mikor megy a motor,mert drain-en a dióda kikapcsolása utána megjelenik a bemf,kb. 3ms-ig a 8V-os táphoz képest negativ 50 mV, ami kb.3ms alatt csökken le 0-ra (nő vissza tápig) mutatva,hogy áll a motor.
Persze 70 ms-ként lökdösve a tengelyt az folyamatosnak látszik, 30sec alatt fordul körbe.Majd megmérem,hogy ez hány m/h," jó,ha az ember ismeri a határokat".
Ha 5ms/2ms pulzussal hajtom,ekkor ugye gyorsabban megy és az indítások-megállások jól láthatóak-hallhatóak,ezért gondolok arra,hogy lágy fel és lefutással a remegést meg lehet szüntetni.Ez ugyan vezérlés és nem szabályozás,de a motor mindig max.nyomatékán járna,és elvileg jobb, mintha az átlag áramot akarnám tartani.
L165-ből építek egy analog végfokot,ha nem megy,akkor megint tanultam valamit a saját káromon,remélem mások az enyémen.
A vagonok tömeg azért kérdeztem,mert az én mozdonyaim 83 ill.79 grammosak és érzesem szerint a vagonok jóval kisebb súlyúak voltak,sajnos nem mértem meg őket.
Tíz nap múlva átmegyek Keszthelyre hogy lássak közelről is cuccokat.
A "Tatet1.jpg-t nagyobb bontásban nem tudod kitenni?
|
|
(#13198) piltdownman válasza etwg hozzászólására (#13176)
|
Válasz •
|
Jan 26, 2013 |
|
Az eröltetett fékezés az, amikor a DCC mozdonyt nem a kezelögombbal fékezed, hanem a valami más. Pl. egy jelzö elött automatikusan fékez, ezt valahogy tudtára kell
adni a mozdonynak. (s csak annak az egynek, amelyik a jelzö felé megy).
Gondolom két szigetelt sínszakasz között lehet egy "repeater" (?)-rel befűzni valamit a sinjelbe vagy aszimmetrizálni azt.Mivel nem lehelem a szabványban nyilván máskép van megoldva. Hogyan?
|
|
(#13199) etwg válasza piltdownman hozzászólására (#13198)
|
Válasz •
|
Jan 26, 2013 |
|
Igen a jelzö elött egy megszakitott szakasz egy un. "fékmodulon" keresztül kap áramot. Ez nem csinál sokat, csak eltolja a DCC jel szimmetriáját, azaz az egyik polaritás nem lesz akkora, mint a másik.
A dekodér továbbra is müködik, hiszen az a 0 átmenetekre érzékeny, a DCC jel abszolut értéke megmarad, csak lesz benne némi DC komponens.
Ezt érzékeli a dekodér (már amelyik ezt érti), és ilyenkor az adott irányba elinditja a fékezést. (a másik irányba átmegy a szakaszon minden változás nélkül).
Erre kellhet az a két ellenállás.
Itt van egy kolléga (remélem egyszer csak feltünik itt is), aki az ilyen modulok hazai gyártoja is. |
|
(#13200) piltdownman válasza etwg hozzászólására (#13199)
|
Válasz •
|
Jan 27, 2013 |
|
Ennek a PIC-nek nincs ADC-je.Annyira aszimmetrikus a jel,hogy a bemeneten 2V alatt lesz és így tud "O" érzékelni?Ha ez nincs így,akkor ez az áramkör nem tudja az erőltetett fékezést.
(0.5m/h,de hát ebben a módban akár 1cm/h- ra is le tudok menni.) |
|
(#13202) etwg válasza piltdownman hozzászólására (#13200)
|
Válasz •
|
Jan 27, 2013 |
|
Ezért irtam, hogy "már amelyik érti". De nem biztos (söt), hogy ehhez ADC kell. |
|
(#13244) csíkosháTTú válasza piltdownman hozzászólására (#13198)
|
Válasz •
|
Jan 28, 2013 |
|
Három féle megoldás létezik erre:
1: az etwg barátom által is vázolt megoldás, az aszimmertikus DCC, vagyis a Lenz ABC (Advanced Brake Control).
2: a ROCO megoldása a Bremsen Generator-ral. Jó drága, és szerintem több a baj vele, mint a haszon.
3: Zimo HLU: ez is drága, de nagyon elegáns, és hihetetlenül jól működő megoldás.
Egy kis hallgatni való, egy régi előadásom a BTTB klubban pont erről a témáról:
fékezés
|
|
(#13287) csíkosháTTú hozzászólása
|
Válasz •
|
Jan 28, 2013 |
|
Uraim!
3 emberke kitaró munkájának köszönhetően elkészült a Tran DCC vezérlőközpont magyar használati utasítása!
Elolvasható/letölthető
INNEN |
|
(#13448) piltdownman válasza csíkosháTTú hozzászólására (#13183)
|
Válasz •
|
Jan 30, 2013 |
|
Készséggel elfogadom a gyakorlatot,de furcsa,hogy van egy szabvány ami egyérteműen ír elő valamit és ettől eltérnek.
A CV47-64 gyártótól függűen a szabadon programozható változók, a CV9-re nem ezt mondja.
Az SL75-nél mennyi időt vesz igénybe a 170sec-es hangfile betöltése a modulba? |
|
(#13449) piltdownman válasza csíkosháTTú hozzászólására (#13184)
|
Válasz •
|
Jan 30, 2013 |
|
A fárasztó gépi hang ellen álvéletlen generátorral FM-ben kéne a hangot modulálni."
Mint anno az MR-nél végzett hangtechnikus, vegyük úgy, hogy ezt nem olvastam
Dobgépeken van olyan,hogy direkt elrontják a ritmust a fáradás ellen.Próbáltam,de csak rövid ideig,az egész dobgép unalmas volt.
A doppler illúziót nyilván nem akárhol várom.
Az orrom előtt 20cm-re elmegy a vonat balról jobbra, közben a fütty megszólal és hangerő nő lineárisan nő, a frekv. végig mondjuk 440Hz, az orrom előtt a frekv. leugrik 400Hz-re és a hangerő lecsökken max.-ról majd kikapcsol, szóval csak egy helyen keltene érzelmeket
azokban,akik így szocializálódtak,már hogy hallottak igazi mozdonyfütty dopplert.
A puding próbája az evés.
(Azon elmerengtem,hogy ezt régen anyagtemetővel, oszcillátor,modulátor,háromszögenerátor stb. lehetett megcsinálni,most meg felhúzok egy 8 lábú kontrollert.
Ha egyszer a műhely felé jársz, majd megmutatom a Tran pár hangját (Taurus, NoHAB, Big Boy) meg fogsz lepődni. Pedig "csak" 8bit/22,5kHz a mintevételezés.
Ha ezt vehetem meghívásnak,köszönöm és élni fogok vele.
|
|
(#13450) piltdownman válasza etwg hozzászólására (#13176)
|
Válasz •
|
Jan 30, 2013 |
|
A mellékelt rajzon az általam tökéletesitett analog meghajtó egység, amiben 2 áramkör is figyeli a mozdony müködését. Egy AC visszacsatolásu kör az ismétlödö nagyobb frekvenciájú terhelést hivatott komnzálni, a másik meg a vonatra akasztott, illetve pálya okozta DC terhelést.
Ez alatt a áramvisszacsatolás soros "pick"-kelő kondenzátorát érted?
Nehezen esett le a tantusz a párhuzamos fesz. + egyidejű soros áramvisszacsatolásnak látszó végfok miatt.
Van valami,ami megindokolja,hogy a fűrész kisütését nem dióda,hanem egy annak kötött
tranzisztor csinálja?
Ha jól értem,kis fordulaton tejesen lineáris,adott fordulat (vez.fesz.)felett engedi a végfokra az impulzusokat. Ezeknek a szélességét veszi le a végfog emitteréről járatott tranzisztor vagy ez csak túláram védő?
Hajlamos begerjedésre?
|
|
(#13451) piltdownman válasza etwg hozzászólására (#13202)
|
Válasz •
|
Jan 30, 2013 |
|
István előadásából kiderült,hogy 2V környéki aszimmeriáról van szó,biztos hogy adc-vel a legegyszerűbb.Persze lehet csak komparátoros proc.-ral is bűvészkedni vagy külső áramkörökkel.
|
|
(#13452) piltdownman válasza csíkosháTTú hozzászólására (#13244)
|
Válasz •
|
Jan 30, 2013 |
|
ABC-vel kapcsolatban említesz dióda hidat plusz egy diódat.Ez nem egy dióda + antiparalell 4 soros dióda? |
|
(#13454) etwg válasza piltdownman hozzászólására (#13450)
|
Válasz •
|
Jan 30, 2013 |
|
Ne keverd össze a dolgokat. Az általam kifejlesztett kapcsolás nem digitális, hanem sima analog - két fö különbséggel:
1. Amikor a motornak a legtöbb energiára van szüksége akkor impulzussorozatot kap, azaz kb. 3 V-ig a DC-re 12 V-s impulzusokat keverek, amivel a motor abszolut simán indul elvileg 0 V feszültségröl.
2. A különleges visszacsatolás az egyik ohmos a másik egy felüláteresztö szürön keresztül változtatja meg a kimenö feszültséget. Azaz a rövididejü nehézségeket (pl. a kardáncsuklók vesztesége), ill. a gözmozdonyon a csatlók fékezöhatását kompenzálja. Az ohmos visszacsatolás meg az általános terhelés (hegymenet, nehéz vonat stb. hivatott kompenzálni).
A DCC-ben ezt a uC-n belül kell megoldani és kizárolag az impulzusok szelességével. |
|
(#13604) piltdownman válasza etwg hozzászólására (#13454)
|
Válasz •
|
Feb 4, 2013 |
|
Igyekszem nem összekeverni és ha szabad szőrszálat hasogatni,attól,hogy egy terhelésre jutó teljesítményt nem egy lineáris hanem egy kapcsolóüzemű (pwm) végfokozat szolgáltatja,a rendszer még analóg.Akkor lesz digitális,ha a szabályott hurkon belül egy jellemző csak diszkrét értékeket vehet fel.Amíg pl. a pulzus szélesség egy adott tartományon belül tetszőleges értékeket vehet a különbség jó közelítéssel csak a hatásfokban van.
A 12V-os pulzusok kiakaszják a végfokot vagy lineáris marad?
A "tatet01" kapcsolás az árammérő,az összegző erősítő,valamint a végfok,az áramkorlátozó tranzisztor és az irányváltó relét meghúzó tranzisztor kivételével egyszerűen leprogrammozható egy min. 10 lábú PIC-be.A végfok lehet fet-es híd,de az árammérés ill. a negativ kimenő ellenállás sw-s megoldása már nehezebb. Pl. az aram 100mA körül mozog,amit 1ohmon 100mV,1LSB 8 bites ADC esetén kb.400uV,míg a bemf ugyan 2Vpp környékén van,amit imád egy 5V referenciájú ADC,de kis sebességen a bemf is kicsi.
Azzal egyetértek,hogy a induláskor a max. fesz.-t rá kell adni a motorra amíg megindul, ezért is gondoltam azt,hogy a túláramvédő tranzisztor korlátozza az impulzusszélességet. Az impulzusok hosszát ill. közöttük lévő szünetet próbálom máskép kezelni.
Mértem a mozdonyok ellenállását a keféken keresztül, 20 és 50 ohm között ingadozik attól
függően,hogy hova fordítom a forgórészt,nem csak az "egy tekercs - párhuzamos két
tekercs" szindróma.Ez normális,vagy csak nálam rossz a kefék felfekvése?
|
|
(#13607) etwg válasza piltdownman hozzászólására (#13604)
|
Válasz •
|
Feb 4, 2013 |
|
A végfok lineáris marad, azaz a 12 V-s impulzusok simán hozzáadódnak a sima egyenfeszültséghez, majd amikor az eléri a kb 4 V-t, akkor lassan kicsengenek, és eltünnek. Az impulzusszéllesség adott (beállitható), de nem változik müködés közben.
A lényeg az, hogy a motoron nagyobb sebességnél nem lesznek impulzusok, igy azt kevésbé terhelik (tovább él).
Amugy most épitettem egy másfajta PWM vezérlést, ami csakis PWM-et ad, de az impulzusszélesség a terheléstöl függöen változik, azaz, ha leterhelem a motort, akkor szélesebb impulzusok mennek ki és forditva.
Ezt uC-vel nem igen lehet megoldani, mert a veszteségek elkerülése miatt mintegy 1000-s erösités kell a visszacsatoló ágban - ezt meg nem tudja a uC - ehhez OPAMP kell.
Szerintem megközelitöleg jo értékeket mérsz a motorodon. (Anélkül, hogy tudnám milyen motor, de a kommutátor egyik állásában 2 tekercs ellenállását méred a másikban meg söntölve egy harmadik tekerccsel kisebb értéket kapsz - 3 polusu motor) |
|
(#13609) piltdownman válasza etwg hozzászólására (#13607)
|
Válasz •
|
Feb 4, 2013 |
|
Ilyesmit néztél?Ezt meglehet spékelni az impulzusokkal ami a többi sallanggal együtt a uC-ből jön.
Bővebben: Link |
|
(#13615) etwg válasza piltdownman hozzászólására (#13609)
|
Válasz •
|
Feb 5, 2013 |
|
Nev vagyok nagy hiva a uC megoldásoknak, amennyiben azokra semmi szükség nincs (sokan csak uC-vel tudnak PWM-et elöállitani ).
Az elméleti leirás stimmel, és ugyanez történik a tatet1-ben is, csak nem kell semilyen uC. |
|
(#13616) csíkosháTTú válasza piltdownman hozzászólására (#13449)
|
Válasz •
|
Feb 5, 2013 |
|
"Ha ezt vehetem meghívásnak,köszönöm és élni fogok vele."
Veheted!
A régi BTTB körmotorok gyártása azért nem volt a precizitás hősi emlékműve  . Az általad mért értékek nagyjából helyesek. De, mint etwg barátom is írta, ezek három pólusú motorok, ezt is figyelembe kell venni. A palástjukra írt adatokból azért kiindulhatsz, az van rajtuk, hogy 12V, meg az, hogy 180mA. Tapasztalatom, hogy közel 100% kitöltésű 14V-os PWM jellel meghajtva, üresen cca. 70-80mA áramot vesznek fel. |
|
(#13739) piltdownman válasza etwg hozzászólására (#13607)
|
Válasz •
|
Feb 7, 2013 |
|
Honnan jön az 1000-szeres erősítés? A "tatet01."-ben a negativ fesz. visszacsatolásnak nagyobbnak kell lennie,mint a pozitiv áramvisszacsatolás,mert begerjed vagy kiakad.A kapcs.rajz jobb oldalát nem tudnád nagyobb bontásban kitenni?
Ki fogom mérni egy PIC AD-jét,ha ref.fesz. csak 100mV,a spefikációban nincs zaj adat.
|
|
(#13740) piltdownman válasza etwg hozzászólására (#13615)
|
Válasz •
|
Feb 7, 2013 |
|
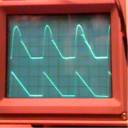
Na újra szkópoknál.
Összedobtam a lináris végfokot és erre nyomok jelet függvénygenerátorból.
Olyat trapéz jelet szerettem volna, hogy gyors felfutás után 3 ms tető, majd lefutás. Ehhez fel kell programozni a generátort, úgy hogy aszimmetrikus háromszöggel néztem. Kihajtom max. áramra, majd szünet. A sebesség a szünet rövidítésével nő, ha
összetorlódik, nyomja fel a DC-t és tűnik el az impulzus, mint a "tatet01"-ben.
A rángatást nem látni, csak hallani. Azt nem veszem észre, hogy a mozdonyok üresen futnak, vagy húznak három kocsit.
Kipróbálom emelkedőn. Milyen emelkedési szögön futnak a modellek?
Egyébként nem az az életszerű, hogy emelkedőn lelassul?
Az egyik szénkefém nem szén, mintha réz/bronz lenne. Ez miért van? |
|
|
|
(#13744) etwg válasza piltdownman hozzászólására (#13740)
|
Válasz •
|
Feb 8, 2013 |
|
A rángatást egy kicsit lehet csökkenteni, ha növeled a frekvenciát (de alapjában nem érdemes vele foglalkozni, ha minden más rendben van). Azokon a régi motorokon az impulzusok hatása sokkal inkább hallható, mert rossz a csapágy, laza a tekercselés stb.
A kefék egyike szinterezett bronz (bronzpor szénporral keverve) szokott lenni. Már nem emlékszem pontosan mi ennek az oka, de valaha nagyon régen olvastam erre egy eszmefuttatást. A drágább motorokban mind a két kefe ilyen szokott lenni, de pl. a Dremelben mind a kettö sima szén).
A modellvasuton az emelkedés kb. 3%-ban van maximálva.
Az egy elvi kérdés, (és sok gyár hülyesége), hogy mennyire kell kompenzálni az emelkedön megnövekvö terhelést. A modern valodi jármüveknél van egy un. sebességtartó vezérlés, amikor beadják az adott pályasebességet, és az elektronika ezt tartja.
Régen a vezér "huzott" rá, ha birta a gép.
A tatet1-ben csak annyira kompenzálom a hajtást, hogy az csak a vonat terhelését kompenzálja az emelkedöjét már ne, azaz ott természtesen lassuljon a modellszerelvény. |
|
(#13745) etwg válasza piltdownman hozzászólására (#13739)
|
Válasz •
|
Feb 8, 2013 |
|
Az 1000-es erösités onnan jön, hogy minél nagyobb méröellenállás a motorkörben annál rosszabb lesz a motor vezérlése (nagyobb áramnál több feszültség esik az ellenálláson, ami végül hiányzik a motornak).
Ezért a méröellenállást nem lehet 1-2 tized Ohm felé vinni.
Példa:
1 A-t kell tartani a motoron, azaz a max. teljesitményt - gyakorlatilag teljes tápfeszt (nagyon vékony negativ impulzusokkal) kell a motorra adni
Ha 1/10 Ohmot veszel, akkor azon 1 A 100mV feszültséget ad. Egy olyan kapcsolásban, ahol OPAMP-okkal kezeled az impulzusszélességet, ott ennek a 0,1V-nak kb. a teljes tápfeszt kell adnia (tegyük fel 10V-t) azaz 100-szoros erösitö kell).
Amennyiben uC-vel teszed ugyanezt, nyilván ott "digitálisan" kell ugyanezt az erösitést elérni.
Ha nagyobb áramokat akarsz tartani, akkor még kisebbre kell venni a méröellenállást, ami még nagyobb erösitést igényel. |
|
(#13839) piltdownman válasza etwg hozzászólására (#13744)
|
Válasz •
|
Feb 10, 2013 |
|
A tatet1-ben csak annyira kompenzálom a hajtást, hogy az csak a vonat terhelését kompenzálja az emelkedöjét már ne, azaz ott természtesen lassuljon a modellszerelvény.
DCC-nél hogy érzékelik az emelkedőt? Szigetelt sínszakasz + fék modul vagy van valamilyen
érzéklő a mozdonyon és az szól be a kontrollernek?
|
|
(#13840) piltdownman válasza etwg hozzászólására (#13745)
|
Válasz •
|
Feb 10, 2013 |
|
Ezzel nem értek egyet,márhogy miért kell a árammérőellenállásnak kicsinek lennie.
Ha 1Ohm lenne a mérőellenállás,az azon eső feszültségvesztességet könnyen lehetne
korrrigálni a tápfesz. emelésével.
A probléma ott van,hogy a motort fesz.generátorról kell járatni.A "tate01"-en a
végtranzisztort ki lehetne cserélni egy npn emitterkövetőre és a motort értelemszerűen
annak emitterébe lehetne kötni.Ekkor viszont a zárlatvédelem megoldása kényelmetlen.
A kis kimenő ellenállás megvalósításához a párhuzamos fesz.visszacsatolással ellátott
földelt emitteres tranzisztor jó csak ehhez nagy nyílthurkú erősítés kell.Ezt (máskép
mondva a tranzisztor meredekségét) az emitterbe/source-ba rakott ellenállás rontja,hiszen
ez pont áramgenerátort akar csinálnia a fokozatból.
Átrajzoltam a "tate01"-t op.amp.-osra,hogy jobban lehessen érteni,továbbá az erősítőket
invertálók módosítottam.
A motor ellenállásán (20 Ohm) egy 100mA-es áram 2V-ot ejt,ezt kell kompenzálni egy negativ
feszültséggel, amit a R4(1 Ohm) -on eső fesz.ből hoz létre a P1-el 20-szorosra
állított erősítő.
Persze ennek a kapcsolásnak van hátránya,pl. hogy teljesítmény op.amp. kell zárlatvédelemmel,a disszipációval is kell kezdeni valamit,valamint a papír elég sok mindent elbír és jöhetnek a meglepetések.
Muszáj kipróbálnom ,mert volt kezemben egy nagyobb mozdony,aminek a súlya kb.200g volt
és a kocsik súlya is nagyobb,mint az én játékszereimé és nyilván kell a visszaszabályozás,
nem lesz elég a vezérlés.
Mekkora a legnehezebb TT-s mozdony súlya? |
|
|
|
(#13841) etwg válasza piltdownman hozzászólására (#13839)
|
Válasz •
|
Feb 10, 2013 |
|
Az elöbbi hsz-.ben irtam, hogy PWM hajtásnál az impulzus szélességet kell hozzáidomitani a terheléshez.
Nagyobb terhelés nagyobb impulzusszélesség.
Egyet ne felejts el, hogy egyik kapcsolás sem negativ belsö ellenállásu, mert csak akkor lehetne elfelejteni a motorámkörben levö ellenállást.
A negativ belsö ellenállásnak egy hátránya van, hogy sokkal nagyobb tápfesz kell a helyes müködéshez (különben szaturál). A modellvasuton meg nem igen van tartalék |
|
(#13849) piltdownman válasza etwg hozzászólására (#13841)
|
Válasz •
|
Feb 10, 2013 |
|
Az elöbbi hsz-.ben irtam, hogy PWM hajtásnál az impulzus szélességet kell hozzáidomitani a terheléshez.
Ez igaz,de áramkörileg csak azt jelenti,hogy összegző erősítő és a motor között van egy feszültség - pulzus szélesség átalakító,aminek ha elég magas a vivőfrekvenciája és az output/input függvényének sávszélessége,akkor nincs hatása a hurokra.A pwm "érzékenysége" könnyen állítható.Pl.ha a "tate01"-en a fűrész 1Vpp akkor a vez fesz. 0-1V tartományban megcsinálja a 0 - 100% pwm-t (nem számítva a diódákat).
Egyet ne felejts el, hogy egyik kapcsolás sem negativ belsö ellenállásu, mert csak akkor lehetne elfelejteni a motorámkörben levö ellenállást.
Szvsz negativ.Rakj egy 20ohmos potit a "tate01"-be a motor helyébe,állíts be valamilyen fesz.esést rajta.Csökkentsd az ellenállást.Ha fesz.gen. lenne,a fesz. az ellenálláson nem változna.ha áramgenerátor lenne a fesz.csökkenne. A fesz. nőni fog,ha túl van kompenzálva, begerjed.
|
|
(#13855) etwg válasza piltdownman hozzászólására (#13849)
|
Válasz •
|
Feb 11, 2013 |
|
Sokkal egyszerübben meg lehet ezt oldani, a fürész jel kapcsolo szintjét lehet a visszacsatolással változtatni, igy a PWM kitöltési tényzöje is változik.
A negativ belsö ellenállást az egész vezérlési tartományra kell érteni, és itt kerülsz bajba, mert a max. sebesség környékén már nem fog müködni, mert nincs miböl.
|
|
(#14001) piltdownman válasza piltdownman hozzászólására (#13849)
|
Válasz •
|
Feb 13, 2013 |
|
Pontosan így gondolom,csak a példát vettem a "tate01" bal oldaláról.
A 170.old. egy hurkon belüli pwm-et használó á.k.
Bővebben: Link
Átrajzoltam tisztességesre.
A kimenő ellenállást két mérés eredményéből lehet kiszámítani az Rg=R * (U1-U2)/(2U2-U1)
képlettel,ahol U1 az R terhelés, U2 pedig az R/2 terhelés esetén mért kimeneti feszültség.
Mivel a kimenő fesz. a pozitív v.cs. miatt a terhelés növekedésével nő,U2>U1 -nél ezért a kimenő ellenállás negatív.
A negativ belsö ellenállást az egész vezérlési tartományra kell érteni, és itt kerülsz bajba, mert a max. sebesség környékén már nem fog müködni, mert nincs miböl.
Ezt nem értem.A max.seb.-hez a max.megengedett fesz. tartozik illetve óvatosnak kell lenni, nehogy leugorjon a sínről a szerelvény.A végfok mindenkép kiakad,mindegy hogy a pozitív v.cs. miatt, vagy anélkül,de teljesen kihajtva.
Amit nem értek,a megtalált szabályzók egyike sem foglakozik a "relé effektus"-sal ill. a súrlódással, miszerint miért kell több áram a meghúzáshoz mint a tartáshoz.
Hosszú pályán gond a vas sínek csatlakozása?Érdemes figyelni,hogy középre kerüljön
a betáp?
Érdemes 10 pontnál jobban közelíteni a fel-és lefutást,vagy csak elszállt a kolléga és élvezkedik az adott lehetőségekkel? (Mint a Ludmilla leírás a hangfile-ban, vagy az Excel4 repülőgép szimulátora.)
|
|
|
|
(#14007) etwg válasza piltdownman hozzászólására (#14001)
|
Válasz •
|
Feb 13, 2013 |
|
Ez most minden jo meg szép, csak már elvesztettük a fonalat. Mit is akarsz te most csinálni?
Egy DCC áramkörben nem tudsz analog OPAMP-okkal dolgozni. Igy oda a téma passzé.
A max. sebességen is tartanod illene a sebességet, azaz kompenzálnod kellene a méröellenálláson keletkezö veszteséget, de oda mát nem lesz miböl, legfeljebb csak abban esetben, ha 0-90%-ban határozod meg a PVM munkatartamát, és a maradék 10%-t a kompenzáciora tartod fenn (amivel viszont veszitesz a vezérlés finomságából.
Az alapszabály az szokott lenni, hogy méterenként vannak csatlakozási pontok.
A 10 pontos közelités már egészen jó.
|
|
(#14016) piltdownman válasza etwg hozzászólására (#14007)
|
Válasz •
|
Feb 13, 2013 |
|
Ez most minden jo meg szép, csak már elvesztettük a fonalat. Mit is akarsz te most csinálni?
Végső soron az unokáimat szeretném ránevelni arra,hogy szépséget találjanak a
műszaki tárgyakban,a kapcsolási rajzokban,stb. a réz csodádat már szeretik.
Ehhez régi TT mozdonyokat szeretnék DCC vezérléssel ellátni,0-ról indulva.Elöszőr
egy jó asztali analóg szabályzót kéne csinálni,majd ezt PWM-esíteni,végül a
mozdonyra áttenni.Ha megvan a megfelelő analóg meghajtó jel,azt könnyű PWM-ben
realizálni.
Kezdek kicsit konyítani a DC motorokhoz,de még mindig a vezérlés-szabályzás
dilémmájával küzdök,mert a kis tömegű vonatok szépen mennek vezérléssel,nem is
veszem észre a nyomatékszabályozást, de nagyobb tömegű szerelvények hiánya miatt
stilszerűen holt vágányon vagyok,a szabályozást nem tudom kipróbálni kb. két hétig.
Opamp.-okat adott határok között jól lehet realizálni uC-ben, a kis szintű áramjel
feldolgozása valóban probléma,ezt ki kell mérjem,végső esetben lehet,hogy kell egy
opamp.Mivel kicsi a hely,két panel lesz a mozdonyokon.
0-90% simán pótolható a nagyobb tápfesz.-szel, a finomság 10bites PWM lesz.
Kösz. a segítséget. |
|
(#14019) etwg válasza piltdownman hozzászólására (#14016)
|
Válasz •
|
Feb 13, 2013 |
|
A bajok ott szoktak kezdödni, hogy gyakran még egy primitiv DCC dekodér sem fér el egy TT mozdonyban (ha csak nem csinálsz neki valami más rovására helyet). Szoval nem kéne ilyen nagy igényekkel kezdeni, ha valoban magad szeretnéd a dolgokat megépiteni. Ezekben a legujabb modern dekóderekben már több mint 10 éves tapasztalat és tudás rejtözik (ki magától, ki másoktól énekelte az LGT), amit nem lehet sem utolérni, sem nagyon célként sem kitüzni.
Annyit szerintem most már megbeszéltünk, ami biztosan elég egy jo vezérlö megépitésére (lehet az a tatet1 egy javitott verzioja - hiszen már vagy 10 éves, igy ráfér ), de lehet sima PWM is, esetleg visszacsatolással és digitális vezérléssel (fokozatkapcsolással).
Sokkal jobb hatást érsz el, ha a kezdetben megprobálod a vasuti üzemet szimulálni, a szép lassu indulást, kifutást, a lassulásokat stb. Ha ez átmegy a gyerekek vérébe, akkor már a vasutmodellezés felsöbb kategoriájába lépnek, és egészen másképp állnak a dologhoz, mint az FZ1 tekerök.
( Csak csendben és szürkén jegyzem meg - a klubunkban egy valodi villanymotorvonat vezetöállását épitettem be közel ugyanolyan funkciokkal, mint a nagy vasuton - a 2 mozdonyvezetön illetve rajtunk kivül - fiam meg én - senki nem tudja vele kezelni a vonatokat, s ha nem vagyunk ott, akkor mindig ki van kapcsolva  és tekergetik a potenciométert. Ennyit a nagy profi vasutmodellezökröl. és tekergetik a potenciométert. Ennyit a nagy profi vasutmodellezökröl. )
Szóval én igy kezdeném. várjuk majd mire jutottál. Természtesen a jövöben is bármikor bármit megvitathatunk ebben a témában, hiszen érdekel engem is.
 |
|
(#14024) csíkosháTTú válasza etwg hozzászólására (#14019)
|
Válasz •
|
Feb 14, 2013 |
|
Idézet:
„"A bajok ott szoktak kezdödni, hogy gyakran még egy primitiv DCC dekodér sem fér el egy TT mozdonyban (ha csak nem csinálsz neki valami más rovására helyet)."”
Engedelmeddel ezt, mint gyakorló TT-s cáfolnám. Jelenleg én nem tudok olyan TT mozdonyt (régi Zeuke, vagy BTTB-t pláne nem!), amibe ne férne bele egy meglehetősen bonyolult DCC dekóder, a Tran DCX76D, vagy a DCX76zD. De a korábbi Tran sorozatok - DCX74, DCX75 - is bőven beleférnek ezekbe a modellekbe. Én speciel, mivel meglehetősen utálom a mechanikus munkát (vágás, faragás, reszelés), így tapasztalatból tudom, hogy ezek a dekóderek nem vesznek el helyet más alkatrészektől, még a V36, BR81, BR92 esetében sem. |
|
(#14025) etwg válasza csíkosháTTú hozzászólására (#14024)
|
Válasz •
|
Feb 14, 2013 |
|
István elvesztetted a fonalat.
A kolléga maga kivánja a dekodert kifejleszteni és megépiteni, söt esetleg kiegésztiteni egy analog OPAMP egységgel. Mindezt, akár két darabban, begyömöszölni egy TT mozdonyba.
Mi nagyon jól tudjuk, hogy mennyi idö meg energia után jutottak el a nagyok oda, hogy ma már van egy félmaréknyi dekodér, ami befér a legszükebb mozdonyba is. |
|
(#14030) csíkosháTTú válasza etwg hozzászólására (#14025)
|
Válasz •
|
Feb 14, 2013 |
|
Hjaaa!
Odahaza, sokszor 0402 SMD méretkóddal dolgozni? 
Azt lehet! Sőt, ha ez nem megy, akkor lehet egy komplett gyorsvonat kocsijait teletömni egy ilyen vezérléssel. Ennek viszont sok értelme szerintem nincs. Szép kihívás, de időpocsékolás és a sok elméleti fejtegetés után egy feleslegesen túlbonyolított, szükségtelenül komplikált vezérlés születik. Nekem már sokszor az is nehézséget okoz, hogy az általam gyártott FD200 sima funkció dekóder SMD paneljét beültessem. Pedig abban nincs is ilyen kicsi alkatrész, csak 3 problémás eleme van, két SOT363 tok, meg egy 4*10k ellenállás, ami 1206-os.
Ráadásul kívülről vezetni egy terepasztalt ilyennel nem lehet. Nem véletlenül születtek meg a mozdonydekóderek. |
|
(#14097) piltdownman válasza etwg hozzászólására (#14019)
|
Válasz •
|
Feb 15, 2013 |
|
Eredetileg is átakartam a Fz1-et alakítani és valami kezelhetőség felraknia a vonatokra Bluetooth-szal vagy infrával,mikor belebukkantam a DCC-be és arra gondoltam,hogy mégis csak legyen valamivel kompatibilis.
A DCC asztali rész hw-je kész van,egy lift vezérlőt átkötök 230VAC-ról 24VDC-re,a három hídból kettőt használok,csak sw-t kell írni,hogy néhány kapcsolót,poti-t rá lehessen kötni.Nekem a DC motor szabályozása a probléma a meglévő ismereteimmel,mert pl.nem mennék bele 32bites AVR alapú szabályozás megépítésébe.
A dekóder digitális része mondhatnám pofon egyszerű,ha a szabványt megértem egy hét alatt
felhúzok a uC-t,itt arról a kommunikációról kéne infó,hogy megy végbe a sinen álló mozdonyokba való adatátvitel,hogyan ugrik a decoder programozó módba etc. hogy ne kelljen a spanyol viaszt feltalálni.
Mondjuk ha kézve vehetnék a programozó ketyerét meg egy dekódert simán letörném.
A kis méretek valóban gondot okozhatnának,de van beültetős céges ismerősöm.
A kezelő pult(ok?) mechanikája,ergonómiája,egyáltalán hogy nézzen ki,nekem ez a gond.
Két babuska és egy legényke egyidőben való játszási lehetőségére kell tekintettel lennem,
Te hogy oldanád meg?
Ha ez átmegy a gyerekek vérébe,
A digit.waveform gen. kezelése már megy
Közben megjött egy "ER20 OHE".Na erre rögtön begerjedt a poz.v.cs.,úgy hogy az 1Ohm után
1k/100n aluláteresztőt kellett.Ez a mozdony 100Hz meredek felfutású pwm mellett zenélt,de
ha szinuszos fel-lefutással hajtom,úgy nem hallom a sípolást és kézzel lefogva érezhető,hogy a nyomatéka is megvan,árammérő fejjel látszik,hogy teljesen ki van hajtva.
Mivel nincsenek szigetelt sínszakaszaim,amik között alacsonyabb lett volna a tápfesz.,megdöntöttem az asztalt,hogy lássam a sebességváltozást.Nem nagyon veszem észre,inkább csak a hallom,hogy alacsonyabb illetve magasabb hangon szólnak a mozdonyok az emelkedőn ill. a leejtőn.A negativ kimenő ellenállású végfokon sem veszem észre. 
Csináltam egy kb.3 fokos buktatót,ha ezen észrevétlenül menne át mind a három mozdony kis és nagy sebességgel egyaránt,akkor mondanám,hogy heuréka.
Te hogy érzékeled a nyomaték kompenzációt?
Az említett klub nyilvános?
|
|
|
|
|
| |
2026. Jún, 26. Pé
21:00:26 |
| |
Jelenleg 14 fő olvassa az oldalt |
|
|