|
|
|
Terepasztal vezérlés és elektronika
|
Témaindító: nzozz, idő: Júl 14, 2010
Témakörök:
|
|
|
(#57853) flocsy válasza piltdownman hozzászólására (#57847)
|
Válasz •
|
Dec 2, 2017 |

|
És mit jelent a megpatkolás? Hova kell tenni a "patkót"?
220V ---- PC táp ---- 5V ------- Arduino
\ \---- 5V ------- szervók
\------ 12V ----- H-híd ---- sínek
És miben tér el egy áramkorlát áramkör egy egyszerű olvadó biztosítéktól? |
|
(#57854) etwg válasza flocsy hozzászólására (#57853)
|
Válasz •
|
Dec 3, 2017 |
|
Lehet, hogy téged nem érint, mert kicsi az a dioráma amit épitesz, de az adott hálozati részben vigyázni kell, mert a sinek "lebegnek" azaz bármelyik potencionálon lehetnek ( +12V és GND) igy hozzájuk nem köthetsz semmit, vagy nem vezérelhetsz velük semmit ( sinkapcsolo, sinkontaktus ). Amennyiben lesznek lekapcsolhato szakaszok ( az elektrofog nem okoz gondot), akkor a kapcsolok is csak a H-hid kimenetével lehetnelkgalvanikus kapcsolatban ( és pl nem lehetnek a GND-vel vagy bármelyik táp kimenettel). |
|
(#57855) flocsy válasza etwg hozzászólására (#57840)
|
Válasz •
|
Dec 3, 2017 |
|
Megvan a current-sense pin a modulon. Alapból jumperelve van, ha jól látom a GND-re. Sajnos az nem értem a data sheet alapján, hogy mekkora és milyen fajta ("not of a wire wound type"?) Rsense ellenállást kéne betenni a jumper helyére:
L298 - CSA-pin ---+--- Rsense ---- GND
Azt jól értem, hogy az általam plusszal jelölt helyen kéne bekötnöm mondjuk az Arduino egyik analóg bemenetére, és ott tudnám mérni a feszültséget (azt sem értem az mennyi lehet, talán -1V - +2V? elég zavaros ez nekem), amit utána kisérletezés során használhatnék a PID értékek kiszámításához? |
|
(#57856) etwg válasza flocsy hozzászólására (#57855)
|
Válasz •
|
Dec 3, 2017 |
|
Ehhez több dolgot kéne tudni. Pl milyen a motor áramfelvétele.
Tegyük fel hogy 200 mA ( max terhelésnél 12 V -n). Ha ilyen motorhoz a current sensre (CS) mondjuk 1 Ohmos ellenállást (1-5W tégla alaku kb 1-33 ohm tartományban a motortol és az áramától függ) teszel be akkor ezen az ellenálláson max terhelésnél 0,2V jelenik meg. Ez lineáris lesz ha csökken az áram, akkor csökken ez a feszültség. Nem árt a current senseröl levett feszültséget egy RC-körrel szürni ( mondjuk 10 kOhm, 1-5 uF/15V) és igy vezetni az ADC bemenetre. )
Lehet hogy némi erösitésre is szükség lesz - mondjuk 10x gainnel, ami a 0,2V bol 2V-t csinál ( igy könnyebb dolgozni).
A kodnak azt kell majd tudnia, hogy amikor elindul a motor tarthatja a current sensen (CS) a beállitott áramot ( tegyük fel fél sebességen 100 mA, azaz 0,1/1V-t).
Pl induláskor növeli a PWM kitöltési tényezöjét addig, amig meg nem jelenik a feszültség a CS-n, majd visszaszabályoz, ha az érték nagyobb az elvárt értéknél stb. Gyakorlatilag minden sebességfokozathoz beprogramozol egy egyensulyi állapotot és ezt fogja neked az elektronika tartani függetlenül a pillanatnyi terheléstöl.
|
|
(#57857) Lazsi válasza flocsy hozzászólására (#57855)
|
Válasz •
|
Dec 3, 2017 |
|
Idézet:
„not of a wire wound type”
Vagyis ne legyen tekercselt huzal ellenállás. Gondolom azért, mert annak saját induktivitása van (még ha kicsi is), ami negatívan befolyásolja az érzékelést, de rossz esetben akár a működést is. |
|
(#57858) flocsy válasza etwg hozzászólására (#57856)
|
Válasz •
|
Dec 3, 2017 |
|
Megpróbálok összerakni egy dilikört, amin tudom 12V DC-ről futtatni elég ideig (jelenleg csak egy 1m-es egyenes szakaszom van) és megmérni az áramfelvételt (ez a DC mérés kell, ugye, akkor is, ha PWM-ről beszélünk?)
Az adatlap 4-ik oldalán ez áll: "Vsense: Sensin Voltage, -1 to 2.3V" ami számomra teljesen érthetetlen. 0-tól X-ig még érteném, vagy -X-től +X-ig is. De mi ez az asszimetria? És hogy kezeljem ezt az arduinoval, ami 0-5V-ot tud mérni az analóg bemeneten?
A válaszod többi része számomra még sok kutatnivaló kifejezést rejt 
1. RC kör: jól értem, hogy ez a mi esetünkben nem is kör, hanem a current-sense ponttól (amit még mindig nem tudok, hogy az ellenállás melyik oldalára kell kötni, az L298 felé vagy a GND felé eső oldalára?) az arduinó analóg bemenete felé sorba kéne kötni egy 10kOhm os ellenállást és egy 1-5mikroFarrados kondit? És egyébknént miért jó ez az RC kör itt?
2. Az erősítés: nem az lenne a legcélszerübb, ha az Rsense-t megfelelően méretezve a kapott feszültségintervallumot úgy felerősíteném, hogy a 0-5V intervallumba essen? Nem akkor tudom a legpontosabban mérni az arduinon?
Megyek mérni... |
|
(#57859) etwg válasza Lazsi hozzászólására (#57857)
|
Válasz •
|
Dec 3, 2017 |
|
Ilyesmikkel ne nagyon törödj. Ezek a dolgok minket nem annyira zavarnak, hacsak nem ajarsz te us szuperszonikus frekire menni. Amugy sem kapsz tekercselt ellenállást - ill nem tudod milyen.
|
|
(#57860) etwg válasza flocsy hozzászólására (#57858)
|
Válasz •
|
Dec 3, 2017 |
|
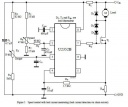
Itt van némi segédanyag: PID control
Itt nincs PID
Arduino
Itt meg a céláramkör.
A jobb also sarokban a te CS ellenállásod megfelelöje amiröl egy RC -vel veszik le a jelet a céláramkör számára.
Én a helyedben elöször mellözném a PIDet.. |
|
|
|
(#57861) flocsy válasza etwg hozzászólására (#57860)
|
Válasz •
|
Dec 3, 2017 |
|
El fogom olvasni ezt a leírást is, bár első árfutásra én is kb ott tartok ahol ő. Nekem is működik már:
PC táp
input - rotary encoderrel illetve potival is
arduino saját sketchel
H-bridge (ebayről)
Van még mit hangolni, de az alapelv működik. Változtatom a kitöltést és a menetirányt is. Valószínűleg még javulni fog egy kicsit a lassúmenet is a frekvencia finomhangolásával.
Bocs, de mint már írtam elektronikailag kezdő vagyok, és még mindíg nem értem:
1. (Az tudom, hogy amikor a potmeter megfelelő lábát rá"kötöm" egy dróttal az arduino A0 lábára, akkor ki tudom olvasni 0-1023-ig az értékét. Ehhez hasonlóan remélem valamilyen módon mérni a current-sense lábon lévő feszültséget) A te általad feltett rajzon van az Rsh. Alatta (a GND oldalán) és felette (a csip oldalán) is van egy fekete pötty. Melyik pöttyre lehet rákötni egy drótot és bevezetni az arduino A1 bemenetére?
2. Az "RC" az az R9 és a C3 együttese, vagy az nincs a rajzon?
3. Mire kell az RC, és mi lenne nélküle? |
|
(#57862) etwg válasza flocsy hozzászólására (#57861)
|
Válasz •
|
Dec 3, 2017 |
|
Igen az RC az az R9, C3 együttese.
Az a pötty az Rsh-n felül felel meg a te esetedben a CS pinnek (1,15).
Azért kell az RC tag, mert az Rsh-n ugyanolyan impulzusok vannak mint ami a PWM-böl jön, plusz rengeteg szemét a motorbol meg a sinekröl. Ezeket igyekszik az RC tag mérhetövé tenni, mert különben at ADC bemenet nem boldogulna a szeméttel. Azaz a C3-n kapsz egy aránylag sima a motorárammal arányos egyenfeszültséget, amit már jo eséllyel lehet mérni. Persze igy nagyon kicsi lesz <0,1V amit nem lesz egyszerü mérni, ezért kell neked erösités. |
|
(#57864) piltdownman válasza flocsy hozzászólására (#57853)
|
Válasz •
|
Dec 4, 2017 |
|
Idézet:
„És miben tér el egy áramkorlát áramkör egy egyszerű olvadó biztosítéktól?”
Elég sokban. Az olvadó bizt. egy kétpólusú passzív alkatrész szemben egy aktív áramkörrel.
biztosíték
túláramvédelem
Az L298-t ha az áram 10ms-ig a 2,5A-t eléri, ki kell kapcsolni. Analóg áramkörökkel vagy uC-es
megoldással egy olyan algoritmust érdemes csinálni, hogy mér - szükség esetén lekapcsol - vár
- bekapcsol -mér stb. hogy automatikusan felálljon és ne kelljen egy kézi reset gomb. (Egy ZXCT10 sokat segítene.) A zárlatvédelmet oldd meg először.
Biztos hogy a „current-sense kivezetések vannak „jumperelve ? Van „snubber” a panelen?
A -1V...+2V a „current-sense” kivezetés megengedett fesz.tartományát jelenti. A szubsztrátról
nem regélek, a +2V megadja, mekkora lehet a max. „Rsense”’. Vagy biztonsággal kis értéket
választasz, vagy megvéded a kivezetést túlfesz. ellen.
PID-et biztos nem írtál.
Az RC kör egy szűrő, a motor kommutációja miatti zajt szedi le, e nélkül nem tudnál mérni.
A 10k - 5uF időállandó az ADC-hez jó, a túláramvédelemhez egy nagyságrenddel kisebb kell.
Neked max. 2W-os ellenállás kell, ez fémréteg kivitelű, nincs induktivitása.
Az áramra szabályozás nyomatéktartásra való, ha sebességet akarsz tartani, a BEMF-et kell mérni.
Ezt megteheted akkor is, ha a driver nem a mozdonyon van, hanem az asztalon.
Szerintem elég lenne, ha minden mozdonyra megnéznéd a minimális és maximális kitöltést
(az induláshoz a min.pulzus szélesség kb. 1ms) . Rövid szerelvény esetén a menetellenállása
nem számít.
Jönnek az unokák, megmutatom nekik a tégla alakú 5W-os ellenállás belsejét.
Egyébként egyszerűbb lenne, ha pl. DRV880x-t használnál. |
|
|
|
(#57865) flocsy válasza etwg hozzászólására (#57856)
|
Válasz •
|
Dec 4, 2017 |
|
Méregettem áramfelvételt (életemben először
A diesel 10mA-nél indul és az 1m-es pályán nem tudtam még megközelíteni sem a 30mA-t.
A gőzös 20mA körül indul és megközelíti a 40mA-t.
Mindkét esetben egy hagyományos (Minitrix) DC trafóval mértem ami azt is jelenti, hogy nem értem el vele a 12V-ot, ami lehet, hogy nem a legjobb számolgatás szempontjából, viszont annyiból élethű, hogy a végleges pálya is csak kb 1m-es lesz, azon sem lehet majd száguldozni.
Csak érdekességképp feltettem más mozdonyokat is, a ma érkezett Fleischmann MAV 470-es 120mA-ról indult csak el. A PWM teszteléshez használt Kato 11-103-as hajtás meg 45mA-ről indul. |
|
(#57866) flocsy válasza piltdownman hozzászólására (#57864)
|
Válasz •
|
Dec 4, 2017 |
|
Ezt a 2.5A-t hol kéne mérni? A H-híd modul 12V-os bemenetén, vagy a motor felé a kimenetén? (arról azt írják, hogy 2A-t tud)
Snubber? (wikipedia... keres...néz...) nem hiszem. Két modulom van, az egyik ilyen mint itt a felső, azon van két henger alakú valami?, de azon nincs current sensing kivezetve, a másik meg ilyen, azon van CSA,CSB pin, úgyhogy ha eljutok a PID megvalósításáig, akkor a másodikat fogom használni. Ha nem, akkor valamelyiket kiválasztom.
Mint a másodikon látható a CSA,CSB is egy-egy jumper mellé van írva ami alapból zárva van. Ezt írják róla: "The current test pin for motor A, this pin can be wired a resistor for current testing or tied a jumper to disable it."
PID-et (még) nem írtam. Ha sikerül megértenem a kapcsolását a számomra megfelelő értékeket az RC körhöz és be tudom szerezni a szükséges alkatrészeket, akkor megpróbálom beépíteni (esetleg a jumperhez hasonló megoldással kiiktatva kezdetben) és ha már a többi része "fix", akkor tudom majd a "firmware" frissítéssel tuningolni. Csak ehhez nem ártana, ha meg tudnám rendelni a szükséges dolgokat hozzá.
Mind a ZXCT10, mind a DRV880x... hogy is mondjam. Én biztos vagyok benne, hogy megfelelő szakértelemmel egyszerübb megoldani velük... csak nem tudom, hogy nekem valaha lesz-e annyi Mondjuk beszerezni tudnám őket. De onnantól nem sokra mennék velük sajnos. NYÁK-ot tervezni se tudok, nemhogy maratni. Igy meg hiába lenne jobb a DRV880x vagy ZXCT10, nekem csak akkor segítene, ha készen modulra szerelve meg tudnám venni. És akkor is biztos sok kérdésem lenne még Ezért kérdeztem a biztosítékról, az még értem hogy tudnám sorosan bekötni valahova.
|
|
(#57867) flocsy válasza piltdownman hozzászólására (#57864)
|
Válasz •
|
Dec 4, 2017 |
|
Ok, akkor lehet, hogy nem is annyira PID kell nekem. Sőt lehet, hogy BEMF sem, mert az meg nincs akkor amikor pont még nem indult el a motor, akkor közelítsük meg a problémát másik irányból: Mit szeretnék elérni?
A minimális PWM kitöltést méregettem már pár napja. Látom, hogy mozdonyonként eltérő, ez rendben is van, ami zavar engem az a kezdeti ugrás. Pl a Kato hajtás 240-es értéktől indul el, de rögtön elég gyorsan szalad, viszont ha már gurul, akkor elég neki 180-as érték is. Erre szeretnék találni valami megoldást. Az lenne a jó, ha amikor egy kattanásnyit tekerek a rotary encoderen, akkor a PWM vezérlésem:
1. meg tudná "lökni" az álló mozdonyt de csak ici-picit
2. (gyorsan) érzékelni tudná, hogy a mozdony áll/elindult már
3. ennek megfelelően változtatná a PWM kitöltést (vagy akár a frekvenciát is?)
és ezáltal elérne egy símább és lassab elindulást.
Vagy egyszerűen csak próbálgatással mérjem meg a következő konstansokat, és "vakon" (visszacsatolás nélkül) indítsam el kb így és a többit meg hagyjam meg a DCC dekódereknek?
0. duty := 0 # "bootol" a rendszer
1. if rotary encoder turned right => duty := loco.startDuty # 240
2. wait(loco.startSpikeLength) # hasra ütök: 100ms
3. duty := loco.minDuty # 180
4. a rotary encoder forgatására változtassa loco.detentStep-nyivel a duty-t
5. if duty < 180 goto 0 else goto 4
az 5-ös nagyon nem tetszik nekem, mert nagyon pici változásra (maszat a sinen, 2-vel több kocsit húz, beolajozták a mozdonyt), előfordulhat, hogy azt hiszi, hogy leállt, pedig még gurul, és megpróbálja elindítni egy 240-es tüskével, de az is előfordulhat, hogy azt hiszi, hogy még gurul ezért 185-ről mondjuk 5-ösével emelgeti a kitöltési tényezőt, miközben a mozdony egy helyben áll és búg amíg eléri a 250-et (direkt nem 240-et írtam) |
|
(#57868) etwg válasza flocsy hozzászólására (#57867)
|
Válasz •
|
Dec 4, 2017 |
|
Valami ott nagyon nem stimmel. Vagy a freki még mindig tul magas vagy nem kap a motor elég áramot ( a feszültség alacsony vagy a hid meghajtása gyenge).
Kezd kb 20-100Hz-l a meghajtást ( fütyülj a bugásra). El kell érned, hogy 10% alatti PWM-nél induljon a mozdony. Köss a motorral párhuzamosan 2 LED-t a korábban leirtak alapján, hogy lásd, hogy valoban az történik, amit gondolsz (müszered sajnos nincs). A LED-ken láthatod a PWM frekvenciáját és a kitöltési tényezöt.
Ha jo a PWM, akkor nem kell semilyen PID. |
|
(#57869) flocsy válasza etwg hozzászólására (#57868)
|
Válasz •
|
Dec 5, 2017 |
|
Mekkora ellenállás kell piros LED-ek elé ha a PWM 12V-os? |
|
(#57870) etwg válasza flocsy hozzászólására (#57869)
|
Válasz •
|
Dec 5, 2017 |
|
1000-4700 Ohm, ha két piros lesz akkor elég 1 ellenállás és a két ledet kösd antiparalel kapcsolásba. (Hosszu láb a másik rövidebbik lábához és forditva, majd az egyik kettös megy az ellenállásra a másik meg a motorra). |
|
(#57872) maya711 válasza etwg hozzászólására (#57852)
|
Válasz •
|
Dec 6, 2017 |
|
Tényleg! a gitárom h/e húrjai kb. 0,3-asok. Köszi!
"Nem adja ki az MTB..." --> akkor ott valami gagyiságot gyanítok(például véghelyzetben is folyik áram). Az keltett aggodalmat bennem, hogy -- leírása szerint -- ugyanúgy működik akár váltófeszültség akár egyenfeszültség(+) van a COM ponton. A TILLIG 86112-esénél ki van kötve, hogy csak váltófeszültséggel működik, a feszültség fázisai és a benne lévő 2 dióda teszi lehetővé a motor kétirányú forgását: ez jól látható a manuáljában közölt belső kapcsolásból. Ők ugyanis nem titkolják azt a hatalmas eszmei tartalmat amit 4 ellenállás, két dióda és egy mikrokapcsoló alkot.
No majd akkor veszek egy MP1-et, feltérképezem, és itt közzéteszem a kapcsolását.
|
|
(#57873) etwg válasza maya711 hozzászólására (#57872)
|
Válasz •
|
Dec 6, 2017 |
|
Az MTB belülröl nagyságrenddel komolyabb berendezés, mint a Tillig. Alacsonyfeszültségü kis áttételes mikromotor ( kb 3V DC) a berendezés lelke és az SMD elektronikának kell biztositania a müködést (nem ugy mint a Tillignél meg a többieknél). Ez persze nem a felhasználo gondja.
Az MTB megy AC-re, de DC-n sokkal jobban müködik a belsö elektronika rendezi az áramigényt ez is hiányzik hasonlo cuccokbol), és DC-n kompatibilis elektronikus berendezésekkel. (arduino stb). |
|
(#57874) etwg válasza etwg hozzászólására (#57873)
|
Válasz •
|
Dec 6, 2017 |
|
Egy kicsit tuloztam. Elektronika nem sok van benne csak vagy 8 alkatrész, ellenállás, zener, meg 2 amit sajnos nem tudok még megfejteni ( nincs rajtuk semmi jel).
|
|
(#57875) etwg válasza etwg hozzászólására (#57874)
|
Válasz •
|
Dec 6, 2017 |
|
Igy néz ki a beteg NYAK.
|
|
|
|
(#57876) róbertke válasza etwg hozzászólására (#57875)
|
Válasz •
|
Dec 6, 2017 |
|
A motoron az egy lassító áttétel? |
|
(#57877) etwg válasza róbertke hozzászólására (#57876)
|
Válasz •
|
Dec 6, 2017 |
|
Igen az egy elég nagy áttétel. |
|
(#57926) BRUT hozzászólása
|
Válasz •
|
Dec 11, 2017 |
|
Szervusztok !
A Festo gyártmányu pneumatikus cilinderek mágneses érzékelöjében reed kontakt van vagy Hall szenzor.
A méretéböl itélve inkább Hall szenzorra tippelek.
Szerintetek mit használnak a gyártók?
Egy ilyen szenzor jó lehet a terepasztal vezérlés megoldásokra? |
|
(#57929) Antal Miklós válasza BRUT hozzászólására (#57926)
|
Válasz •
|
Dec 12, 2017 |
|
Szia.
Én Hall IC-t használok. Jól bevált.
A járművek aljára a mágnest úgy kell felragasztani, hogy a déli pólus legyen a mágnes felé,
A Hall IC-k legtöbbje kb 1 mm-ről érzékel.
Érdemes egy kis db próba sinszálat készíteni,a Hall IC-vel kb 20-30mm hosszút, hogy ellenőrizni lehessen a mágnes helyzetét.
Ha két Hall IC-t közvetlenül egymás mögé ragasztod, a menetirány szerint, akkor még a menetirányt is detektálni lehet.
|
|
(#57934) BRUT hozzászólása
|
Válasz •
|
Dec 12, 2017 |
|
Nos az általam emlitett Festo érzékelöben reed kontakt van.
Eös nagyító segitségével jól látszik.
Azt hittem,hogy a reed csó már feledésbe merült de ugytünik nem.
Ha a hall szenzor csak 1mm távolságra érzékel akkor azt beállítani nem is olyan egyszerü. |
|
(#57936) diginewl válasza BRUT hozzászólására (#57934)
|
Válasz •
|
Dec 12, 2017 |
|
Hali!
Miért nem jó az IS471F? 
Pont te ajánlottad itt. Szerintem tökéletes 4-8mm távolságra érzékel, nem kell hozzá külső elektronika.
|
|
(#57975) etwg hozzászólása
|
Válasz •
|
Dec 16, 2017 |
|
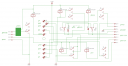
Kiötlöttem egy forgopad vezérlést ( mert a hajdani sajnos 20 év után meghalt). Van benne 5 relé, de kettö most még részben felesleges, de beraktam ki tudja mikor lesz rájuk szükség.
A hidon 2 motor van. Az egyik a forgatomotor, a másik meg a retesz motorja ( ezek adva voltak). Azonkivül tulélte az éveket a duda áramköre amit a zöld négyzet tartamaz.
A fordito motor a MOT ROT
A retesz a MOT LOCK
A REED kontaktus a GND-t kapcsolja az FB kontaktusra
A hid sinjeit a TR kimetekhez kell kötni
A rajz közepén a forgo kontaktusok vannak. A TR a sineket látják el árammal a forgatás közben automatikus polaritásváltás keletkezik.
Ezután jön a GND meg Vcc a táp (12V)
A 3,6 kontaktusok a hid forgatásához adják az áramot (egyszerü szabályozhato feszültség ill irányváltás).
1. kontaktus a Reteszzár LOCK
2. A duda HORN
4. Pozicio visszajelzés FB
A müködés egyszerü.
A kezelöpulton 2 DPDT kapcsolo van az irányváltásra meg a reteszre ( extra a duda nyomogombja).
Ha Retesz kapcsolo reteszel akkor GND kerül a K3 relére, ami váltja a K1 relével a polaritást és a MOT LOCK kinyomja a retesz nyelvét. Ha ez megtörténik a K4 bekapcsolja a sinbe a külsö sintápot.
Ha megszüntetjük a reteszelést a MOT LOCK behuzza a retesznyelvet és bekapcsolja a hidfordito áramkört (K2) azaz csYk ekkor lehet a hidat forgatni.
Az FB kimenetre jelenleg csak egy LED dioda van kötve, ami kijelzi a poziciot ( van mágnes a perem szélén.
|
|
|
|
(#57990) maya711 válasza maya711 hozzászólására (#57872)
|
Válasz •
|
Dec 19, 2017 |
|
Nos, nincs az MP1-ben semmi gagyiság, viszont nagyságrendekkel sem különb a TILLIG 86112-nél. De halkabb és jóval kisebb méretű. A következő váltódekóderemet már ehhez fogom készíteni, a mostani dekóder kisebb átalakítást igényelne(a NYÁKON).
Azért néztem bele mert nem tudtam kitalálni hogy hogyan oldja meg a motor kétirányú forgatását: hát sehogy! A motor mindig egy irányban forog, de a nagy fogaskeréken lévő csap egy-egy félfordulat után a két szélső állásba tolja a szálmozgatót. Ugyanakkor a fogaskerék tengelyén lévő bütykök az egyik félfordulat legvégén átváltják az SW1 és SW2 mikrokapcsolókat. Majd a másik félfordulat legvégén pedig a bütykökről történő lefutás váltja vissza a kapcsolókat. De lehet hogy az SW2 kapcsoló fázisban kissé eltolva működik.
Ígéretemhez híven csatolom a feltérképezett kapcsolást. |
|
|
|
(#57991) etwg válasza maya711 hozzászólására (#57990)
|
Válasz •
|
Dec 19, 2017 |
|
Ezért kár volt bele nézned. Már itt is volt erröl többször is szo, és pontosan emiatt gagyi minden kétirányu konstrukcio. Meg ha kérdezted volna el is mondtam volna. (amugy a nagyvasuton is ugyanilyen elven müködnek a váltoállito motorok - ha nem is mind).
A rajz azonban jol jön. Kösz!
|
|
(#57993) csttom válasza etwg hozzászólására (#57991)
|
Válasz •
|
Dec 19, 2017 |
|
Azért a nagyvasúton lévő motorokról szóló állításnak még egy kicsit utána néznék (tán még a fele sem igaz) |
|
(#57994) etwg válasza csttom hozzászólására (#57993)
|
Válasz •
|
Dec 19, 2017 |
|
Nezz utánna, de egészen biztosan van olyan is ahol a motor egy irányba forog. Annak idején azt kellett egy szemeszter alatt mérecsgélnem
 |
|
(#57998) flocsy válasza etwg hozzászólására (#57991)
|
Válasz •
|
Dec 19, 2017 |
|
Ezt most nem értem. Miért lenne gagyi a kétirányú? Én az SG90-essel szeretném megoldani kétirányuan. |
|
(#57999) etwg válasza flocsy hozzászólására (#57998)
|
Válasz •
|
Dec 20, 2017 |
|
Mert a ketirányu motorhajtás több komplikácioval jár a modellvasuton. A polaritásváltás ritkán illeszkedik a berendezésekhez. Pl. Nem lehet sima nyomogombokkal állitani a váltot (vagy szimmetrikus táp kell). Nem lehet egyenesen egy proci vagy elektronika kimenetére kötni. Minden motorhoz kell valami, ami lehetövé teszi az irányváltást. (Pl váltoáram esetén 2 dioda, egyenáram esetén hid és extra vezeték minden motorhoz.)
Ha egyirányba forog a motor hiba esetén sem törtenik semmi, csak a motor fog körbe forogni, és állitgatni a váltot ide-oda. A másik motornál ilyenkor sérülhet a motor vagy a mechanizmus. Kell még több érv? |
|
(#58000) HarciSün válasza etwg hozzászólására (#57999)
|
Válasz •
|
Dec 20, 2017 |
|
De ugye a szervó motorokban eleve van "valami" ami megoldja az irányváltást, és a vezérlésben nem kell a polaritás váltással foglalkozni - ezért is olyan egyszerű (és olcsó, pontos) szervó motort mikrokontrollerről hajtva váltóállításhoz használni.
Amit írtál egyébként tökéletesen igaz, anno a conrad-os állítóműveimhez nekem is kellett váltónként egy H-hidas IC-t betennem, hogy gombokról legyenek vezérelhetőek a váltóim. (de ugye a conrad állítóművében nem volt semmi elektronika csak két dióda a vezetéken) |
|
(#58001) etwg válasza HarciSün hozzászólására (#58000)
|
Válasz •
|
Dec 20, 2017 |
|
Persze van, amihez külsö proci kell meg némi tanulmány is ( hogy a vezérlö jelek az engedélyezett tartományban maradjanak).
De te is tudod, hogy mivel jár ha "kitekered a szervot" - valamiért nem áll meg a végállásban.
A vasutmodellezök 90 %-a aligha tudna valamit kezdeni a szervokkal ( még a gyári meghajtokon is el-lehet ezt azt programozni ami a szervo végét jelentheti.).
Ezért irtam, hogy az oda-vissza mozgo motoroknál mindig ott a veszély, hogy a végállásban meghibásodhat ( ha nem müködik a végálláskapcsolo vagy a program). A gyári megoldások is ennek a veszélynek vannak kitéve ( ha szervo akkor azért, ha csak Conrad, Tillig vagy Lemaco stb motor, akkor meg azért, mert ott is meghibásodhat a végálláskapcsolo. |
|
(#58002) HarciSün hozzászólása
|
Válasz •
|
Dec 20, 2017 |
|
Hát ugye az alapvető ellentmondás, hogy ha valamit "bolondbiztosra" kell csinálni azt csak bonyolultabban (több alkatrész/nagyobb program) lehet - ha pedig magunk építünk (barkácsolunk) akkor viszont már nem lehetünk bolondok hanem valamit konyítani is kell hozzá.
A szervóvezérlős váltóállítás is tipikus példa erre: vagy megveszed a díszes csomagolású gyári bolondbiztos (vagy annak szánt) terméket amit csak összedugdosol és kész, vagy egy mikrovezérlőre ráakasztod a szervókat és ugyan ott vagy tized áron. (én ez utóbbit választom mert nagyobb is az örömöm hogy én csináltam magamnak - de ez egyéni)
Aki nem tud/akar elmélyedni egy témában az fizesse meg azt (a gyárat/embert) aki már ezt megtette. Ha díszcsomagolást is akar, meg sok oldalas több nyelvű brossúrát is hozzá depláne.
Aki pedig spórolni akar és közben kicsit tanulni is, annak ma már nagyon "könnyű" dolga van az internetnek meg a kínai dömping alkatrészeknek hála.
A legtöbb vita és egymás mellett elbeszélés onnan jön, hogy keverni akarjuk a kettőt, és egy filléres csináld magad megoldást hasonlítunk egy gyárihoz. |
|
(#58004) csttom válasza etwg hozzászólására (#57999)
|
Válasz •
|
Dec 20, 2017 |
|
Semmi kétség, alapvetően igen jó hajtómű az MTB mindkét változata. De van egy hibája, amit senki nem említ, és ami pont az egyirányú motor mozgás és egy végálláskapcsolóból ered. Ha valami okból nem jut el a motor a végállásba, akkor hiába akarom ellenkező irányú paranccsal visszaállítani, nem reagál rá mindaddig, amig az eredeti mozgás végállásba nem ér. Ilyen hiba igen könnyen előadódhat, pl.: ha a váltó dekóder rossz programozás, vagy egyéb hiba miatt nem adja elég ideig a parancsot az állításra.
A leírtakkal nem akartam kisebbíteni az MTB érdemeit, de jó látni az érme mindkét oldalát. |
|
(#58005) csíkosháTTú válasza csttom hozzászólására (#58004)
|
Válasz •
|
Dec 20, 2017 |
|
Magyarul: kénytelenek vagyunk a végállás lekapcsolást a váltómotor belső kapcsolójára bízni. |
|
(#58006) etwg válasza csttom hozzászólására (#58004)
|
Válasz •
|
Dec 20, 2017 |
|
Hát igen. Itt megint a modellezök valami extrát akarnak. Ha már egyszer kiküldted a parancsot, hogy váltson válto - mi okbol akarod ezt a parancsot felülbirálni? ( azaz visszaállitani?). Ez nem igen megy a valoságban sem, és itt is érdemes kivárni azt a 2 másodpercet ami alatt az MTB áttekeri a váltorudat. ( a nagyvasuton ez sokkal hosszabb idö mire leesik a relé és ujra nyomhatod a gombokat....)
Evekig sirtunk a modellhü váltomeghajtok miatt és az egyik nyakatekertebb megoldást kaptunk a másiknál ( ritkán megfizethetö áron), igy mindenki csattogott a mágneses váltomüvekkel ( apropo probáltad azt menetközben visszaváltani ).
Ezt mint negativumot értékelni ugyanaz lenne, mint amikor azt kérnék, hogy dobálják már ki a mozdonyokbol a lendkereket, mert sokáig tart igy az irányváltás.  
Fogadjuk már el, hogy egy váltonak csak két állása van és minden más állás hibás ( a nagyvasuton jegyzökönyvezendö). Igy a modellen is csak akkor válthatunk ha már elérte az egyik állását. |
|
(#58007) etwg válasza maya711 hozzászólására (#57990)
|
Válasz •
|
Dec 20, 2017 |
|
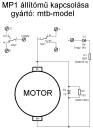
Most, hogy megnézem rendesebben a kapcsolást, ez pontosan amiatt lett igy kialakitva, hogy egy az egyben helyettesiteni tudja a megszokott mágneskapcsolokat. Gyakorlatban ezt a hajtást 1 szál vezérlövezetékkel is meg lehet oldani és akkor nem léphetne fel olyan baj sem ahogy irják, hogy a dekoder rövid jelet ad ki ami alatt a motor nem tud áttekerni a másik állásba.
Eredetileg ez a konstrukcio ilyen vezérlésre lett kitalálva, ezt már az MTB bonyolitotta el, hogy 2 vezetékkel/nyomogombbal kelljen kezelni ( mint a mágneses váltomüvet).
Ilyen volt az eredeti ötlet (lásd a kép), 1 végálláskapcsoloval és mindössze 1 gombbal lehetett kezelni. Ennek a gombnak csak egy pillanatra kellett megnyomva lennie ( addig amig a motor el nem fordult az adott végállásból), innen a motor magátol átállt a másik állásba. ( igy használhato a sinkontaktus is).
Itt csak az a gond, hogy nem kompatibilis a klasszikus 2 gombos vezérléssel. Ezt küszöbölte ki az MTB azzal, hogy most 2 bemenet van és a gombot addig kell nyomni, amig el nem ér a végállásba. |
|
|
|
(#58008) sunocske válasza etwg hozzászólására (#58006)
|
Válasz •
|
Dec 21, 2017 |
|
Idézet:
„Ha már egyszer kiküldted a parancsot, hogy váltson válto - mi okbol akarod ezt a parancsot felülbirálni? ( azaz visszaállitani?). Ez nem igen megy a valoságban sem, és itt is érdemes kivárni azt a 2 másodpercet ami alatt az MTB áttekeri a váltorudat. ”
Az első mondatra: pl. mert elakadt a váltó csúcssínje valamiért, és hogy ne feszüljön a szerkezet, amíg megnézed, mi a hiba.
A második mondatra: ebben a formában ez sem egészen igaz. Számtalan oka lehet, hogy nem kerül egy nagyvasúti váltó végállásba, és bizony megnézhetnénk magunkat, ha nem lehetne visszaállítani abba az állásába, ahol legalább eddig volt neki (gondolj bele, egy darab kővel meg lehetne akasztani a forgalmat a fél országban...). |
|
(#58009) etwg válasza sunocske hozzászólására (#58008)
|
Válasz •
|
Dec 21, 2017 |
|
Félreértetted a problémát.
A nagyvasuton van zár stb, ami kijelzi ha van probléma. Ott is (ha olyan a motor amivel engem/minket szekiroztak majdnem 4 honapig) ha a motor elfordul a másik állásba, csak nem tudja lezárni a váltot (hiba) akkor baj van. Innen ujra indithatod az ellenkezö irányba, de nem elötte, mert nem is tudod, hogy mi van addig a váltoval.
Az MTB-nél is ugyanez van, csak rosszul irta le a kolléga a jelenséget. Miután a motor rugalmas kacsolatban van a váltoval, a motor mindenképpen eléri a másik végállást ( ez az a 1,5-2 masodperc) ha folyamatosan kapja az ahhoz tartozo parancsot , ahonnan bármikor vissza tudod inditani. Az ö igénye az lett volna, hogy mielött a motor eléri a másik állást (azaz azon az ominozus 2 másodpercen belül) akkor tudja visszaforditani. Ezt a nagyvasuton sem tudod megtenni ( azaz a motort ide oda forgatni, ez legfeljebb teszt üzemben lehetséges). Ilyesmit legfeljebb a bakter tudna, aki a körtét ide oda billentgetné, mielött az átbillene a másik állásba. A központi irányitásnál elöször megvárja a kezelö a válto reakcioját ( lezár vagy nem) és ekkor probálhatja visszaforditani, ha gond van.
Szoval az MTB-nel nem az a gond, hogy nem lehet visszaállitani, hanem az, hogy csak bizonyos idö után van erre lehetöség - amikor látod, hogy nem állt át a válto vagy meggondoltad magad ( ami teljesen normális és hiteles). A nagyvasuton is elöször kapsz egy infot, hogy nem állt át a válto ( ilyen info nincs a modellvasuton - csak a modellezö szeme) és ezután indithatod a motor vissza az eredeti állásba.
A modellvasuton ehhez jön egy apro gond DCC üzemben, hogy a váltodekoder mágneses állitomüre van programozva, és azokat védendö, az átállitás jel ( parancs) rövid (1/10 sec körüli), ennyi idö alatt az MTB nem áll át, de kimozdul a vágállásból, és továbra is erre a parancsra vár (2 sec), hiszen valami miatt váltani akartál, és csak ezután lehet "visszatekerni" ( lásd a korábbi irásomat). Itt csak az segit, ha a dekoderen ilyen hosszabb jelidöt állitunk be ( 3 sec a biztonsági idö beállithato a megfelelö CV-vel). Ez alatt a motor biztosan elfordul és ezután állithatod vissza.
Ez sajnos a kompromisszum eredménye. Ahogy irtam, meg lehet csinálni ugy is, hogy ennyi jelidö (1/10 sec) elég lenne, de akkor ugyanazon a kimeneten minden jel váltaná a váltot ( s nem 2 jel ami most van) |
|
(#58010) róbertke válasza sunocske hozzászólására (#58008)
|
Válasz •
|
Dec 21, 2017 |
|
Na te sem voltál bakter soha az életben!
Szolgálat átvételkor Állomásbejárást kell tartani a váltókörzetedben.
Ha találsz valami nem odavalót, eltávolítod. Ha hibára, sérűlésre utaló ok van, azonnal a forgalmi szolgálattevőnek jelzed, ő meg majd intézkedik megfelelőképpen. Villanymotoros váltóállításnál megvan az a védelem, hogyha nem megy valamiért az átállítás a váltó visszaáll az eredeti helyzetébe /nem kell külön parancs!/
Modellezésnél: - Mielőtt bármit elindítanál/üzembe helyeznél végigtekintesz kicsi birodalmadon, és az esetleges nem odavalókat ecset segítségével vagy morzsaporszívóval eltávolítod; |
|
(#58011) flocsy válasza etwg hozzászólására (#58009)
|
Válasz •
|
Dec 21, 2017 |
|
Miért ne lehetne 2 jellel megoldani, hogy a "jel" (ahogy a neve mutatja) csak pillanatnyi legyen, és a váltómotor belső elektronikája "megjegyzi" az irányt. Ehhez gondolom csak pár elektronikai elem szükséges. Talán egy bistabil relé, de ti vagytok a szakik, nem én. |
|
(#58012) flocsy válasza róbertke hozzászólására (#58010)
|
Válasz •
|
Dec 21, 2017 |
|
Arduinos verzió: amikor bootol az arduino, akkor az előre meghatározott állásba állít mindent amit ő vezérel, hogy innentől kezdve tudja mi hol van. |
|
(#58013) róbertke válasza flocsy hozzászólására (#58012)
|
Válasz •
|
Dec 21, 2017 |
|
|
|
(#58014) etwg válasza flocsy hozzászólására (#58011)
|
Válasz •
|
Dec 21, 2017 |
|
Nem kell ehhez semmilyen elektronika csak 2 mikrokapcsolo. Csak a méretek miatt választották ezt a megoldást 1 mikrokapcsoloval. A másik nem vesz részt a motor müködésében.
Az egyik mikrokapcsolo az egyik végállást jelentené a másik meg a másikat. Most ez mechanikailag ugy van kivitelezve, hogy a motor forgat egy 180fokos félkört, ami a mikrokapcsolot nyomja, azaz 180 fokig be van kapcsolva majd 180 fokig nincs.
Ha a félkör helyett 1 bütyök lenne és 2 mikrokapcsolo, akkor az csak a 2 végállásban szakitaná meg a motor áramkörét és várna a forgás folytatására.
Ez igy atombiztos lenne minden tápnál és elektronika nélkül is. Egy baja van, hogy 3 kapcsolo kellene a dobozba.
De nem egyszerübb meghosszabbitani a dekoder jelét 3 sec-re akkor nem lenne semilyen gond sem, és maradhatna ilyen kicsi a váltomü.
Manuális van computervezérlésnél tökéletesen müködik. |
|
(#58015) flocsy válasza róbertke hozzászólására (#58013)
|
Válasz •
|
Dec 21, 2017 |
|
Azt próbáltam leírni félig viccesen, hogy a szolgálatátvételkori teendőkhöz hasonló a mai modern technológia megoldása is: bekapcsoláskor ellenőrzi, hogy minden rendben van és az általa ismert helyen, hogy onnantól kezdve ő tudja irányítani. |
|
|
| |
2026. Máj, 24. Vas
12:56:24 |
| |
Jelenleg 6 fő olvassa az oldalt |
|
|