|
|
|
Terepasztal vezérlés és elektronika
|
Témaindító: nzozz, idő: Júl 14, 2010
Témakörök:
|
|
|
(#57744) csíkosháTTú válasza flocsy hozzászólására (#57736)
|
Válasz •
|
Nov 26, 2017 |

|
Amit hallasz, az a PWM hajtás saját zaja, ha lassú menetben hajtod a modellt. Vagyis a PWM jel kitöltési tényezője alacsony. Ezen úgy tudsz segíteni, ha a PWM frekvenciát felviszed 15-20kHz köré. Akkor is "sírni" fog lassú menetben a motor, csak azt már nem hallod. |
|
(#57745) HarciSün válasza csíkosháTTú hozzászólására (#57743)
|
Válasz •
|
Nov 26, 2017 |
|
Elnézést, valóban nem Neked szántam a választ ETWG hanem Flocsy kollégának, csak mivel Te szóltál hozzá utoljára arra nyomtam, bocsánat.
Csikos: Ok, de teljes kitoltésen már meg kell lennie a bemenő fesznek.
Flocsy:
Próbáld meg a H-híd enable, és egyik irány lábát direktben 5V-ra kötni és ne az Arduino kimenetére - ekkor fixen ki kell jönnie a bemenő 12V-nek.
Ezután a következő lépés, hogy az analóg kimenetet kezded el Arduino alól "közvetlenül" vezérelni próbaképp AnalogWrite parancsokkal, 512-es és 1024-es értékkel. Ez utóbbinál látni fogod hogy valóban a kitöltési tényező-e a gond.
A H-hidnál ha jól tudom 3-lábat kell használnod, ebből 2 adja meg a polaritás irányát és egy a bekapcsolt láb - ugye ez utóbbit szaggatod a pwm jellel?!
(én a WiFi-s mozdonynál a L293D IC-vel szaladtam bele, hogy véletlenül az irányt meghatározó lábra kötöttem a PWM jelet - csinált is mindet csak amit kellett volna azt nem... tehát az irány az fix HIGH vagy LOW lehet csak, és az Enable lábbal lehet a sebességet beállítani!) |
|
(#57750) Lazsi hozzászólása
|
Válasz •
|
Nov 26, 2017 |
|
Esetleg egy kis teljesítményű (optimális lenne 1W alatti...) 12V-os izzót rákapcsolni a kimenetre és figyelni a fényerő változását a PWM változtatására.
Ha van két egyforma ilyen kis teljesítményű izzó, akkor a közbülső értéket, pl. amikor 5V-nak megfelelő a kitöltési tényező, össze lehet hasonlítani a direktben 5V-ra kapcsolt izzó fényerejével.
Amire mindenképpen figyelni kell, hogy az áram ne legyen nagyobb annál, mint amire a H-híd tervezve van. (12V - 1.2W -> 0.1A Azonban az izzó ellenállása hidegen kisebb, mint az így számított...) |
|
(#57751) piltdownman válasza flocsy hozzászólására (#57737)
|
Válasz •
|
Nov 27, 2017 |
|
Írogatnék sorrendben, ahogy olvastam a hozzászólásaidat.
Az Arduinoba a bootloadert AVR programozóval tudod betölteni, nem az USB felületen.
A Nanon három helyen tudsz beadni tápot: pin14/15, USB, ICSP.
Az USB-n lévő 5V egy Schottky diódán keresztül össze van kötve a másik két 5V-tal.Ezt könnyű
tönkretenni, ha mindkét oldalon megtáplálod.
Az Arduino PC-s felülete nem emulátor, honnan eredhet ez a tévedés?
Egy uC lábbal és két leddel négy állapot tudsz megjeleníteni: egyik sem ég, piros ég, zöld ég,
mindkettő ég. A két ledet antiparallel kötöd, egyik végük a uC-re, a másik két sorosan kötött
ellenállás közös pontjára, az ellenállások másik vége a tápra ill. a földre megy.
Egy buck tápban mindig van induktivitás, ha nincs, akkor egy áramkör minden lehet, kivéve
kapcs. üzemű tápegység.
Az, hogy egy kimenet PWM vagy DC, multiméterrel alábbi módon döntheted el. Leterheled a
kimenetet mondjuk 1k-val (szimmetrikus kimenet esetén a két kimenet közé kötöd). Összesodrod a mérőzsinórokat és AC állásban fesz.-t mérsz. Ez egyen fesz. kimenet esetén nulla, PWM esetén, ha változtatod a kitöltést, maximumot tudsz mérni, DC állásban pedig a kitöltési tényezőt is pontosan meg tudod határozni némi számolással.
A PWM frekvenciáját az 5,000.- Ft feletti frekv.mérő funkcióval rendelkező multiméterekkel meg kell tudni mérni. Az lehet, hogy a bemenetre sorba kell rakni egy 100nF kondenzátort. 20kHz-ig biztos, hogy igazak a fentiek.
Az „analogWrite” PWM frekvenciája 490Hz,kitöltés 0-255 értékekre 0-100%.
Timer interrupttal talán fel lehet menni 10kHz feletti vivőre.
Ha kicsi a kitöltés, nem megy a mozdony, zenél a csapágy, a tekercselés, a vas. A motortól függ,
hogy muszáj-e a hallható frekv.tartomány fölé menni. |
|
(#57752) piltdownman válasza HarciSün hozzászólására (#57745)
|
Válasz •
|
Nov 27, 2017 |
|
Az Arduino analóg-digital konvertere a 10bites, a digital-analóg ( a nativ PWM) csak 8bites.
Itt az L298 sematikus belseje. A kapcsolók npn tranzisztorok.
Az IN bemenetek egyszerre vezérlik ellentétes állásokba a hozzájuk tartozó kapcsolókat, az ENA bemenet letiltja az egész áramkört. Ha IN bemenetek egyformák, úgy a híd alsó vagy felső fele rövidre zárja a hídágban lévő motort.
A motor fordulatszámát és irányát kétféleképpen lehet állítani.
1.ENA állandóan magas szinten,az egyik IN alacsony vagy magas szinten, a másik IN-en PWM.
Ez esetben egy uC esetén két kivezetésnek kell tudnia PWM-t szolgáltatnia.
2.Elég csak egy uC kivezetésen a PWM-et előálljtani, de két további, egymásnak komplemens
kimenet kell az irányváltáshoz.
Minden tranzisztorral párhuzamosan kell kötni egy-egy diódát az induktív rúgások ellen,a rajzon csak a hatásos diódákat rajzoltam be.
A két vezérlés között a kikapcsolt állapot kezelése a különböző. Az első esetben a tekercs áramát egy soros dióda-tranzisztor zárja rövidre, a második esetben két dióda a tekercs áramát vissza-táplálja a tápegység felé. |
|
|
|
(#57753) etwg válasza piltdownman hozzászólására (#57752)
|
Válasz •
|
Nov 27, 2017 |
|
Ehhez még annyit, hogy céljainkra 8 bites felbontás is sok, untig elég a 7 vagy 6 bites PWM, ( sok DCC-ben még ennyi sincs). A 7 bites 128 lépesben kezeli a sebességet a 6 bit ennek a felében. Mind a kettö több, mint amit egy 555-s timerrel meg egy potival el lehet érni - igaz azt joval egyszerübben.
|
|
(#57754) flocsy válasza piltdownman hozzászólására (#57751)
|
Válasz •
|
Nov 27, 2017 |
|
Köszönöm mindenkinek a válaszokat!!!!
HarciSün: ha DC módban mérem a sinen a PWM jelet, akkor 20-as értéknél (ami ugye kevesebb mint 10%) 8V körüli értéket mutat (ezen meg is lepődtem, mert vagy 12 vagy 1 V körülire számítottam), és ahogy növelem szépen lassan növekszik.
Már találtam pár Arduino könyvtárat, és este megpróbálom a TimerOne nevűt, elvileg azzal viszonylag egyszerűen lehet a PWM frekijét állítani majd, csak még meg kéne értenem, hogy milyen mellékhatásai lesznek (mivel ez átállítja az 1-es órajelet, ami megváltoztatja a delay funkciüt is, ha jól értem)
Az H-hidat úgy kötöttem, hogy az IN1,IN2-re HIGH,LOW illetve LOW,HIGH-et adok az iránynak megfelelően, és az ENA-ra megy a PWM jel. Több helyen utánaolvastam, és ha jól értem ti is ezt mondjátok, mint az egyik lehetséges megoldás.
Amikor te véletlenül az egyik IN-re raktad a PWM jelet, akkor azért nem ment szerintem, mert az L298 leírása alapján 2 féle "leállás" mód van: 1. ha a két IN-re azonos polatítást adsz, akkor "Fast Motor Stop", ha meg 2. EN-re LOW-t raksz, akkor mindegy mi van az IN-eken és ez "Free Running Motor Stop". Igy, ha jól értem, amikor az egyik IN-re PWM-et adtál, akkor vagy a vagy a duty cycle alatt, vagy pont a "reciprokán" Fast Stoppot csinál, amikor a két IN-en éppen azonos a bemenet.
Lazsi: asszem van otthon 2 régi 12V-os "autó" izzóm, csak nem tudom milyen a teljesítményük. Mi történne, ha rosszul méretezett fogyasztót kapcsolok a H-híd kimenetére? A H-híd 2A-t tud leadni. Tönkre mehet valami, vagy csak nem fog világytani? (pl ha a gondolatmenet végett egy 100W-os 220V-os izzót kötnék rá)
piltdownman: Az én arduinómon már van bootloader (remélem a Nanoban is lesz, mert különben nem fogom tudni használni), amikor én programozásról beszéltem (lehet, hogy nem ez a jó kifejezés, de én nem elektronikai, hanem számítástechnikai háttérrel rendelkezem) akkor az Arduino sketch a számítógépről USB porton keresztül az Arduinoba "másolásáról" írtam.
A Nano bemenetei: mi van a pin14,15-re írva? Mert a neten a fotókat nézve sehogy sem jön ki jól a lábszámlálás. Nem a VIN és a GND feliratúakrül beszélünk?
Bár, lehet, hogy ennél még könnyebb lesz az ICSP lábait használni, ha jól értelmezem az ábrákat, akkor a pin2 +5V, és a pin6 GND, és az 1-es lábra vagy ráírják hogy "1", vagy négyzet alakú lukkal jelölik. A többi lábat meg szabadon hagyhatom, ugye?
Amit az antiparallel kötött LEDekről, meg a két ellenállásról írtál az *** azt hiszem az amit végül én is csináltam, lásd a csagolt képet, a lila drót megy az arduino logikai kimenetére.
Este kipróbálom az összesodort mérőzsinórral. Tetszik az ötlet!
Az adott általam "rossz"-nak titulált PWM vezérlő kimenetén már próbáltam* mérni a frekvenciát, és 16kHz körülit mért, ami jó is lehetne, de rettenetesen ingadozik ahogy változtatom a kitöltési tényezőt. (Egyébként már visszautalták az árát.) A "jó" PWM-nél az általam elvártnak megfelelően nem változott a frekvencia.
*) Én simán a kimenetre kötöttem a multimetert a méréshez. Lehet, hogy ez nem jó?
Amikor azt írod, hogy a bemenetre sorba kössek egy 100nF-os kondit, akkor (kezdő kérdés, nem nevetni!) ez pontosan mit jelent? A GND-t simán rákötni, és a +12V-ot a kondin keresztül?
A másik dolog amit még esetleg kipróbálok majd, hogy a PC tápra kötöm, mert eddig valami olcsó villanyvasutas táppal próbáltam. Bár ha a többi PWM vezérlőnek jó volt, akkor talán mégsem ez a baj, vagy ha a PWM vezérlő "túl érzékeny", akkor lehet, hogy inkább hanyagolni kéne.
Az "asszem" az milyen szem? |
|
|
|
(#57755) csíkosháTTú hozzászólása
|
Válasz •
|
Nov 27, 2017 |
|
Gyerekek!
Elveszünk a felesleges részletekben!
1: A PWM jel zúgatja, búgatja a motort, amíg az nem kezd el forogni, és azután is, ha kis kitöltési tényezővel hajtjuk meg! Ez nem hiba, a PWM hajtás az ilyen, megijedni nem kell tőle. Ha a PWM impulzus csúcsa nem haladja meg a motor maximális feszültségét (esetünkben a 12V-t), akkor semminek nem lesz ettől baja.
2: Zavaró tud lenni? Persze, rossz hallani. Ezt viszont csak úgy tudjuk elkerülni, ha ezt a búgást olyan frekvenciára visszük, amit az emberi fül már nem hall meg.
De, azért ennek a nagyfrekvenciás hajtásnak vannak korlátai. Pl. Tillig Fi2 szabályzóval a Fuggerth M41-es modell meg sem mozdul, mert a PWM frekvenciát rosszul választották meg. Nem véletlen, hogy a saját PWM vezérlőm az 150Hz körül dolgozik, és Medveczky Endre kollágáé is. Vannak DCC dekóderek is - pl. az Uhlenbrock is ilyen - amivel erősen hallani lehet a motor sírását meginduláskor. Legalább a Traxx mozdonyokba nem kell hangdekóder, kb ugyanúgy "sírnak", mint az igazi...  |
|
(#57756) flocsy válasza piltdownman hozzászólására (#57752)
|
Válasz •
|
Nov 27, 2017 |
|
Az 1-es variáció nem azt csinálja, hogy amikor az egyik IN-re kötött PWM jel azonos a másik IN-re adott jellel, akkor "Fast Motor Stop"-ot csinál, amikor meg különböző, akkor ar egyik irányba "megy" a motor? Ez gyakorlatilag a PWM jel frekvenciájának megfelelő lépésekben lökdösi/fékezi a motort? Mi van akkor, ha egy lökés ideje nem elég, hogy a motor elforduljon? Akkor egy helyben fog vibrálni?
És ha elindul a motor, milyen hatással van a motorra, illetve a teljesítményére? Miért kötné be valak direkt így, ha ehhez "fel kell áldozni" még egy pwm outputot az arduinon? Van valami előnye a 2-es variációhoz képest? |
|
(#57759) flocsy válasza csíkosháTTú hozzászólására (#57755)
|
Válasz •
|
Nov 27, 2017 |
|
Ok, *** azt hiszem a legfontosabb tényleg az, hogy nem kell megijedni a búgástól, mert én azt hittem valami zárlatos és mindjárt leég a motor.
Ha lesz időm, lehet, hogy eljátszok majd a frekivel, és átírom a progit, hogy egy másik potmeterrel tudjam változtatni menet közben és kalibrálni mi a legjobb az adott mozdonynak és a fülemnek (utána meg majd tesztelem a gyerekeken, hátha ők még hallani fogják, mikor én már nem) Ha a projekt végén marad szabad bemenetem esetleg jumpereléssel válszthatóvá is tudom tenni 2 vagy 4 előre eldöntött frekvencia küzül melyikkel szeretném használni.
Azt hiszem, és nem "asszem", ha kérhetem! |
|
(#57762) etwg válasza flocsy hozzászólására (#57756)
|
Válasz •
|
Nov 27, 2017 |
|
Elég nehéz igy a kommunikácio veled. Ilyen feladatokhoz nem árt, ha ott log az orrunk elött a kapcsolási rajz: pl.
Ebböl minden világos. Az 1A meg a 2A a forgási irányt határozza meg. Igy az impulzusokat az EN bemenetre kell küldeni. A FAST MOTOR STOP azt jelenti, hogy ilyenkor egyforma potenciál van a motor sarkain, ami bizonyos esetekben fékezéshez vezethet. A mi frekvenciáinknál ez nem jellemzö, csak akkor, ha hosszabb idöre leáll az impulzus..
A diodákra nincs szükség, ha L293D az áramkör.
Izzokhoz a nagy autoizzok nem jok, kis model izzok vagy LED-k kellenek.
|
|
|
|
(#57764) flocsy válasza etwg hozzászólására (#57762)
|
Válasz •
|
Nov 27, 2017 |
|
Én ebből a leírásból vontam le a következtetéseimet, azon belül is a 6-ik ábrából. Ami a saját kapcsolásomat illeti, tudok küldeni linket tinkercad.com-ra, vagy betenni screenshot-ot. Amikor ezt relevánsnak éreztem ezt meg is tettem.
Ja, valaki kérdezett szimulátorról, akkor erről beszéltem: tinkercad.com . Ott meg lehet "építeni" egyszerűbb arduinos kapcsoláskat, és kiproóbálni. |
|
(#57765) etwg válasza flocsy hozzászólására (#57764)
|
Válasz •
|
Nov 27, 2017 |
|
Az L293 és az L298 között csak teljesitmény különbség van, illetve a tokozás más.
Az irányváltás 1A/2A a 10/12- s lábak. Az EN a 11-s. Minden más ugyanugy érvényes, mint az elöbb emlitett L293 esetében. Ráadásul az L298 szabadon futo, ha az EN=L (Free Running), azaz nem terheli a motort.
Nem árt megfogadni a jövöre nézve egy tanácsot - mielött elkezdesz egy témát, rakd be legalább a screenshotot, hogy mindenkinek világos legyen miröl beszélsz és segiteni tudjunk. Nem kellenek mindenféle speci programok, amit általában mi nem ismerünk, de a kapcsolási rajzokat még tudjuk olvasni és az alapján sokkal könnyebb segiteni. |
|
(#57768) Lazsi válasza flocsy hozzászólására (#57754)
|
Válasz •
|
Nov 27, 2017 |
|
Ahogyan etwg már válaszolt, az autóizzó nem jó. Különösen a fényszóróizzó ( >50W -> >4A ), de a kisebb (pl. 10W-os) is túl erős lehet. 12V - 10W -> <1A, ha a H-híd 2A-t bír, akkor el kellene viselnie működés közben. DE az izzó hidegen, vagyis bekapcsoláskor sokkal kisebb ellenállást produkál, vagyis ennél sokkal nagyobb áramot szeretne felvenni. *
A teljesítményteszthez még jó lehet egy ilyen izzó, de az elinduláshoz, beüzemeléshez kisebb kellene. A H-híd valószínűleg nem menne tönkre (bizonyára van benne védelem is...), csak éppen nem úgy működne, ahogyan kellene és ez hibakereséskor probléma (nem tudhatod, hogy a hiba létezik, vagy te vitted bele a túlterheléssel).
* Rossz esetben következetlen működést is láthatsz. Ha kis PWM érték van beállítva, akkor az áram még lehet elég kicsi, és ezért működik. Nagyon nagy PWM értéknél (mondjuk 100%-os kitöltési tényezőnél) pedig az izzó megkapja a "lórugást", hamar felmelegszik, és ezért működik. Köztes értéknél viszont akár az is kialakulhat, hogy bekapcsoláskor a hideg izzó miatti túlterhelés következtében bekapcsol a védelem, emiatt az izzó nem tud felizzani, így marad kis ellenállású. Minél kisebb teljesítményű az izzó, annál nagyobb eséllyel tudod használni...
Ha az izzód kis méretű, mint a zseblámpaizzók, csak bajonett-foglalatosak, akkor akár működhet a dolog. Ha "telefonizzó" kinézetű, az lenne a legjobb, mert az nagy eséllyel 1W alatti teljesítményű.
Ha csak a műszer van a kimeneten, akkor produkálhat érdekes értékeket, ugyanis ilyenkor nincs terhelve (a műszer belső ellenállása MOhm nagyságrendű lehet). Ezért is kell legalább az az 1kOhm-os ellenállás, amit piltdownman írt korábban. |
|
(#57775) flocsy hozzászólása
|
Válasz •
|
Nov 28, 2017 |
|
Sikerült átállítanom a PWM frekvenciát. Kisérleteztem 150, 1000, 10k 20k Hz-en is. Azt már látom, hogy nem lesz ez olyan könnyű, mint elképzeltem. Talán nem véletlen, hogy a dekóderekben olyan sok dolgot lehet állítani  3 új mozdonnyt próbáltam, mindegyik teljesen másképp viselkedik.
Az első az egy Kato 11-103 hajtás. Azon láttam, hogy van rajta egy zöld "izé" ami itt látható a képen. Ekkor jutott eszembe, hogy a DCC fórumokban szoktak írni olyanokról, hogy egy szűrő kondit ki vagy be kell tenni attól függően, hogy DC vagy DCC üzemben használják. Ki is vettem, és annak hatására sokkal "később" (nagyobb kitöltési tényezőnél) indul el. Viszont amikor visszateszem egész szép a lassúmenetben, főleg 150Hz-en, ahogy CsíkosháTTu írta, viszont úgy borzasztóan visít.
A másik két mozdony amikkel majd ténylegesen szeretném használni az Inglenookot: Dapol 2S-012-007 Class A1X Terrier 0-6-0T egy 3 tengelyes pici gőzős és Graham Farish 371-064 Class 03 egy ugyancsak 3 tengelyes pici dízel. Ezekkel még lesz dolgom...
A gőzös csak 25%-os kitöltés környékén indul el, de rögtön gyorsan és még úgy is elég gyengécske. Ezt majd valahogy le kell lassítani, mert az Inglenookhoz jó lassúmenetre lesz szükség. Ötleteket szívesen veszek!
A dízel valamivel jobb, bár az is elég gyorsan indul meg. |
|
(#57776) etwg válasza flocsy hozzászólására (#57775)
|
Válasz •
|
Nov 28, 2017 |
|
Ilyen mozdonyparknál mindig gondban leszel. Más más gyárto, más más motor és konstrukcio. Ezekhez nem lesz egyszerü univerzális PWM-t épiteni ami mindegyiket egyformán hajtja.
Az a zöld izé az kondenzátor elvben maradhat a motoron, ha a PWM freki kb 1 kHz alatti. Ha kiveszed számithatsz arra, hogy a motor zavarhatja a procit ( meg minden mást a környéken).
Amugy a gyár sem jeleskedett a megoldással, azok a hosszu lábak szép antennát csinálnak a szürés helyett. |
|
(#57781) flocsy válasza etwg hozzászólására (#57776)
|
Válasz •
|
Nov 28, 2017 |
|
Igaz, de nem is kell nekem univerzális PWM, elég, ha sikerül behangolnom 2-4 mozdonyra és teszek a verérlőpultra valami mikrokapcsolót amivel kiválaszthatom, hogy aznap éppen melyik mozdonyt használom és a szoftver meg tudja az előre beállított értékeket.
A két aprócska mozdonyt nem szedtem szét, így nem látom mi van bennük, de lehetséges, hogy a lassúmenetük javítható lenne úgy, hogy betennék "valahova" hasonló kondit? És ha igen, akkor megoldható-e úgy, hogy az áramkörbe teszem be valahova (kb a PWM kimenet és a sín közé) és nem kell buherálni a mozdonyokat? És milyen kondit vegyek ehhez? |
|
(#57783) etwg válasza flocsy hozzászólására (#57781)
|
Válasz •
|
Nov 28, 2017 |
|
Ha a kondi hatással van a PWM-re, akkor már nem jo helyen vagy a frekvenciával. (Tul magas, vagy tul nagy a kondi értéke).
Ha a motorok nagyon eltérnek egymástol ( mezei 3 szegmentes motor - vasmentes motor) akkor nagyon nagy eltérés lesz a használhato PWM-ben. Ezért pontosan ki fog kelleni tesztelned melyik motorhoz milyen PWM a legjobb. |
|
(#57795) piltdownman válasza flocsy hozzászólására (#57754)
|
Válasz •
|
Nov 29, 2017 |
|
Minden Arduinon lévő uC-ben benne van a bootloader, ezért lehet USB-ről rém egyszerűen
betölteni/felprogramozni. Akkor van baj, ha „sikerül” a bootload részbe belepiszkálni, ekkor
kell újra felhúzniaz SPI- keresztül.
Badarságot írtam, a Nano estében a diódát csak föld-rövidzárral lehet tönkretenni, az 5V-okkal
nem, mea culpa. Alább lerajzoltam a Nano-t felülnézetből, alatta a tápellátás. Az VIN-re min.6,
max.15 V-t lehet adni,ha AMS1117 van a panelen.
Te a ledeket ellenállásokkal közvetlenül földre ill. tápra kötötted, ez különbözik az általam
javasolt kapcsolástól. (Egyébként egy kapcs.rajz a vének számára könnyebben áttekinthető,
mint egy Tinkercad screenshot.)
Lerajzoltam, hogy kell a multiméter frekv. mérő állásában a kondenzátort bekötni. Erre elvileg
nem volna szükség, de pl. a Velleman DVM8264 csak így mér frekvenciát.
|
|
|
|
(#57796) piltdownman válasza flocsy hozzászólására (#57756)
|
Válasz •
|
Nov 29, 2017 |
|
Csak az egyik oldalon lehet PWM, a másokon állandó szint kell. Az igaz, hogy ha két oldal össze
van kötve, akkor nem mozog a motor, de ha ellenütembe vezérled, akkor jobbra -balra forog.
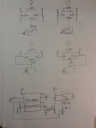
Ugyanolyan forgásirányt kapunk,ha az 1-2 rajzoknak megfelelően kapcsolgatjuk az IN1-et
miközben IN2 magas(!) szinten van, vagy amikor az 1-3 ábrák szerint az IN2-t kapcsolgatjuk és
az IN1 alacsony (!) szinten van. A különbség csak abban van, hogy a felső vagy az alsó hídágak
vezetik el a motor induktivitásán folyó áramot a kikapcsolás után. (Fast Motor Stop.)
Ugyanígy forog a motor az 1-4 szerinti vezérlésnél, amikor az ENA-t kapcsolgatja a PWM, csak
ekkor a kikapcsolási áramot a két dióda vezeti el. (Free Running Motor Stop.)
Áttekinthetőbb 1x ill. 2x kapcsolás,alattuk közvetlenül a motoron/diódán lévő feszültség
(a dióda anódjához képest) és a motoron átfolyó áram.
Bekapcsoláskor kb. exponenciálisan nő az áram, kikapcsoláskor ez 0-ra csökken, a folytonos
vonal felel meg a „Fast motor Stop”-nak, ez a hosszabb idejű.(TT-s mozdonyoknál kb. 05.ms )
Ezt az áramot zárja rövidre a dióda a maga 0,7V-jával. Ha ez nem lenne, a szaggatottan jelölt
elvileg végtelen nagyságú feszültség impulzus jelenne meg a kapcsolón.
Ezután látszik a motor által generált, a fordulatszámmal arányos „BEMF”,ami egy idő után a
motor leállásával megszűnik. .
DC motor meghajtásánál nincs különbség, hogy az IN-ekre, vagy a ENA-ra megy a PWM,nyilván
uC használata esetén a két vezetékes az egyszerűbb.
A léptető motornál jelentősen előnyösebb az ENA-ra adni a PWM-et.
Kérdéseidre: a PWM lökdösi a motort, de nem fékezi, ha nem elég hosszú az ideje, helyben
vibrál.
A motor nyomatéka ill. veszteségi teljesítménye a motoron átfolyó áram átlagával ill.
effektív értékével arányos.
Részletesebben innentől kezdve.
A L298-ban nincs túláram védelem.
A #57762 hozzászólásban berakott táblázat legalsó sora sajtóhibás, „Free Running Motor
Stop” a helyes szöveg. |
|
|
|
(#57797) etwg válasza piltdownman hozzászólására (#57796)
|
Válasz •
|
Nov 29, 2017 |
|
Az utolso mondatodhoz: az az L293-s chipre vonatkozott a Texastol. Annak egy kicsit más a belsö felépitése, mint az L298-snak és az EN jel közvetlenül a kimeneti hidra is hatással van ( a termikus védelemmel összekomponálva).
Nem mértem (mert nekem is csak L298-s van otthon), de lehet, hogy igazuk van a Fast Motor Stop-l ha az EN=L.
(Külsöleg vezérlés szempontjábol csak ebben tér el a 293-s a 298-tol). |
|
(#57801) flocsy válasza piltdownman hozzászólására (#57796)
|
Válasz •
|
Nov 29, 2017 |
|
Köszönöm! Ez a link a DCC-s topicból adott egy ötletet: megpróbálom azt megcsinálni, hogy amikor elkezdem tekerni a rotary encodert, akkor az adott mozdonynak megfelelően adjon neki egy kezdőlökést. Egyrész, ha a mozdony nem mozdul meg 240-es duty cycle alatt, akkor értelmetlen hogy tekerni kelljen (10,20,...,230,240), mikor rögtön kezdhetem 240-ről, másrészt megpróbálom azt is, hogy esetleg rögtön 100ms után le is csökkenteném 200-ra, mert ha már beindult, akkor 200-zal is eldöcög, és épp a lassúmenet a cél. |
|
(#57804) piltdownman válasza etwg hozzászólására (#57797)
|
Válasz •
|
Nov 29, 2017 |
|
Nosztalgiából belenéztem a könyveimbe, aztán persze itt van az eredeti SGS L293 adatlap. 9.ábra. Kardélre a TEXAS dok. szerkesztőit!
Az L293E és az L298 logikailag és vezérlés szempontból azonos, nincs bennük sem túl-
áramvédelem, sem hővédelem, a DMOS-os L620x-re gondolhattál.
Az EN mindkét típusnál a bemeneteket AND kapuzza.
A különbségek a két bipoláris áramkör között:
- kimeneti áram 1 ill. 2A, disszipáció 5 ill.25W, tokozás DIL ill.Multiwatt, logikai táp 36 ill. 7V
- a végfok alul npn földelt emitteres , felül pnp földelt emitteres ill.npn emitterkövető.
- áramérzékeléshez a híd mindkét alsó tranzisztorának emittere külön-külön ill. közösítve
van kivezetve
- az L293 és L293D esetében nincsenek kihozva az alsó emitterek
- a hidanként négy dióda csak a L293D -ben van.
Írogatunk mindenfélét, csak a legfontosabbat nem mondjuk az irigylésre méltó fiatal
apukának. Flocsy, a paneled a legegyszerűbb L298-as kapcsolást hordozza, ha sínen
rövidzár lesz, mint ahogy a kitérőknél előfordul, vagy egy csemetéd játszik a csavar-
húzóval, oda a panel. Ne ezt építsd be!
|
|
(#57805) HarciSün hozzászólása
|
Válasz •
|
Nov 29, 2017 |
|
Ha már így benne vagytok az L293D lelkivilágában megkérdezném amire sejtem is a választ:
Ha két motort akarok üzemeltetni róla (egyszerre, egy irányban) akkor jobban járok ha nem csak az egyik motorkimenetet párhuzamosítom, hanem felhasználom mindkét kimenetet és egyszerre vezérlem azokat?
Felteszem így nagyobb áram leadására képes összességében. |
|
(#57806) proba válasza HarciSün hozzászólására (#57805)
|
Válasz •
|
Nov 29, 2017 |
|
A csuda tudja, lehet igen, de ha a vezérlő jelek/és minden egyébb nem pontosan egyforma, összenyithatnak a kimenetek. Úgy viszont már más a helyzet. |
|
(#57807) piltdownman válasza piltdownman hozzászólására (#57804)
|
Válasz •
|
Nov 29, 2017 |
|
Mind a L293-akban ,mind a L298-ban van hővédelem. Á, csak az adatlapok ötödik sorában
van nagy betűkkel. Dobjatok a padlóla le!
|
|
(#57808) piltdownman válasza HarciSün hozzászólására (#57805)
|
Válasz •
|
Nov 29, 2017 |
|
Ha így gondoltad, akkor igen. 2.ábra.
bridge drivers
Vigyázz, mert a L293D bekötése eltér a L298-étól, áramérzékelő kivezetése sincs.
|
|
(#57809) HarciSün válasza piltdownman hozzászólására (#57808)
|
Válasz •
|
Nov 29, 2017 |
|
Én még egyszerűbben úgy gondoltam, hogy nem is közösítem a kimeneteket (mint a rajzon) hanem egyik az egyik a másik másik motorra, de a bemeneteket párhuzamosítom - tehát ugyan azt kapják a mikrokontrollertől (irány, pwm).
De akkor elvileg van értelme a dolognak. |
|
(#57813) etwg válasza piltdownman hozzászólására (#57804)
|
Válasz •
|
Nov 29, 2017 |
|
Ezek szerint a papir sok mindent elbir. ITT nézd meg a 6. ábrát, teljesen mást mond amit a te könyveid.
|
|
(#57816) flocsy válasza piltdownman hozzászólására (#57804)
|
Válasz •
|
Nov 29, 2017 |
|
Ez nagyon jó észrevétel, tényleg a tervezésben hangsúlyozni próbálom a biztonságot és üzembiztonságot.
De akkor a későbbi hozzászólásod alapján jól értem, hogy annyira nem gáz, és használhatók ezek? Igaz ez a legolcsóbb kínai áru amit a neten leltem... |
|
(#57817) flocsy hozzászólása
|
Válasz •
|
Nov 29, 2017 |
|
Megosztom veletek amit ma találtam: TramController. Egy nagyon jó leírás arról, hogy milyen problémákba ütközött és hogy oldotta meg az illető Arduinos PWM vezérlés építését. Van egy Arduino Library is amit feltett a githubra, egész szépen megoldva pont azokat a problémákat amikről tegnap beszéltem (kezdősebesség) de még olyat is csinált, hogy a DCC-hez hasonlóan a program fokozatosan (az előre beállított gyorsulási és lassulási értékeknek megfelelően) állítja a sebességet, illetve automatikus vezérlés esetén még olyat is tud, hogy leáll és megfordul.
Lehet, hogy kéne már egy Arduino topik? Vagy jó ez itt, legalább van élet a topikon? |
|
(#57818) etwg válasza flocsy hozzászólására (#57817)
|
Válasz •
|
Nov 30, 2017 |
|
Nem akarlak elszomoritani, de ez a leirás szörnyü. Az lehet, hogy a dolgot végül is addig eröltette, hogy müködik, csak láthato, hogy a szerzö talán egy pékinasbol gyorstalpalon kiokitott Arduino szakember, megfelelö bátorsággal közzé is tenni amiröl csak némi fogalma van. Irás meg googlizés helyett, sokkal jobban tette volna ha elolvasott volna némi alapvetö szakirodalmat - igaz, hogy ott valoszinü nincs arduino, de a motorok meg a PWM ki van vesézve a végtelenségig. Ráadásul ott van a kezében sok jol müködö DC táp is amit ki is mért - csak éppenséggel nem értett meg. 
A leirás tele van elemi tévedésekkel (tudás hiánya miatt) meg teljesen valotlan dolgokkal - keveri a DC-t a DCC-vel stb. Kár ezzel foglalkozni. Ez megint a modern generácio felületessége, amit összeharácsolt az internetröl, és megalkotott egy öszvért.
( s még örülhet, ha valaki nem szabaditja rá a zavarszürö hatoságot.)
 |
|
(#57822) proba válasza etwg hozzászólására (#57818)
|
Válasz •
|
Nov 30, 2017 |
|
Mondjuk én már azt nem értem, ha kitalálták a DCC-t miért PWM-ezném a sínen keresztül a mozdonyokat. Ha drága a DCC marad a sima DC mint jól bevált módszer. Nem hinném ( igaz nem is próbáltam) hogy a mozdony szebben menne/indulna a sínbe táplált PWM-től. A DCC a motorról visszacsatolt jellel éri el a szép indulást/lassú menetet. Egy több mozdonyra kiterjedő sínhálózaton ez nem igazán kivitelezhető. ( bár utálom a már kész van ne találd fel típusú hozzászólásokat, mégis beállok a sorba) Talán a DC-t is lehetne úgy rákapcsolni, hogy induláskor kicsit nagyobbat, utána visszavenni. de akkor meg ugrana egyet a mozdony. Szivem szerint valami rádiós/bluetootos vezérlést favorizálnák, konstans sínfeszültség mellett. |
|
(#57823) HarciSün válasza proba hozzászólására (#57822)
|
Válasz •
|
Nov 30, 2017 |
|
Idézet:
„ Nem hinném ( igaz nem is próbáltam) hogy a mozdony szebben menne/indulna a sínbe táplált PWM-től.”
Pedig igen. Szebben indul és jobb lassúmenetet produkál az analóg mozdony egy jó PWM vezérléssel mint sima DC-n.
Idézet:
„Szivem szerint valami rádiós/bluetootos vezérlést favorizálnák, konstans sínfeszültség mellett.”
Vigyázz, ezért én már megkaptam a magamét - igaz én a tápellátást is függetlenítettem a síntől... |
|
(#57824) etwg válasza proba hozzászólására (#57822)
|
Válasz •
|
Nov 30, 2017 |
|
A srác nagyon konzekvens más helyeken a honlapján, és többnyire stimmel is amit ir ( reggel 5 ora ota olvasgatom), de ezzel az Arduino agymenéssel komolyan mellé fogott - söt, de ezt kár tárgyalni.
Az impulzusok direkt jot tesznek az induláskor, ha megnézed a honlap DC-tápokkal foglalkozo fejezetét, ahol ott van az az informacio is ami már közel 50 éve közkézen forog Linn Wescott tollábol, és mindenki számára alap irodalom, tárgyalja a motorok meg a tápok viselkedését. És ezt látja némelyik gyári tápban is - amit szépen lemért. Hogy hogyan került innen a Arduino leirásba a szuperszonikus frekvencia illetve mi vezette öt erre az rejtély marad, ami meg azután következik a PWM szürése meg pofon a semminek. |
|
(#57825) etwg válasza HarciSün hozzászólására (#57823)
|
Válasz •
|
Nov 30, 2017 |
|
Az a rádios/BT-s dolog szuper a kerti vasuthoz, ahol az akkukat is van hova elpakolni. Nekünk már 2 ilyen mozdonyunk van és ezzel indul minden szezon, amikor az áttelelt sineket kell ujra üzembe helyezni.
De az már más tészta. |
|
(#57826) csíkosháTTú válasza proba hozzászólására (#57822)
|
Válasz •
|
Nov 30, 2017 |
|
Pedig a PWM-t azért találták fel (csak nem a modellvasút céljára), hogy a hagyományos egyenáramú motorok szebben forogjanak lassú menetben is, valamint azért, hogy a nyomatékuk is legyen, ne csak a névleges feszültségük közelében.
Idézet:
„A DCC a motorról visszacsatolt jellel éri el a szép indulást/lassú menetet.”
Is. De az alap a DCC dekóderek esetében is a PWM vezérlés. Visítanak is induláskor a mozdonyok, ha Uhlenbrock dekóder van bennük... |
|
(#57828) csíkosháTTú hozzászólása
|
Válasz •
|
Nov 30, 2017 |
|
Az egész PWM-es témához részemről az utolsó eszmefuTTatás következik.
1: Eléggé messze kerültünk Flöcsy kolléga alap kérdésétől, hogy miért zúg/visít a mozdony a sínen, ha betáplálja a PWM jelet? Azért mert ez ilyen. Ezzel együtt kell élni. Sajnos a nagyfrekvenciás PWM hajtás analóg üzemben több gondot okoz, mint amennyi gondot megold. Minden mozdonyra működő analóg PWM hajtás létezik több is, csak azok általában 100-240Hz közötti frekvencián dolgoznak, ergo zúg velük a motor meginduláskor, és kis sebességnél.
2: Ahhoz, hogy ezt a zúgást elkerüljük analóg üzemben, ahhoz valamilyen PID szabályzós megoldás kellene. Ez elvileg az Arduino-val is kivitelezhető, még program is van hozzá készen, csak megint jönnek az ilyen megoldás buktatói. Nevezetesen az, hogy egy analóg pályán több mozdony is van, egy PWM hajtásról akár több is mozoghat, és ezek tetszőleges modellek lehetnek. "Globális" megoldás erre az esetre nincs. Nem olyan vészes ám az a zúgás, hogy ennyit munkát belefeccöljünk a "kiírtásába"... 
3: A DCC úgy oldotta meg a problémát, hogy a nagyfrekvenciás hajtás, és az adott motor szabályozott "összhangját" individuálissá tette, vagyis a dekódernek csak azzal az egy motorral kell foglalkoznia, nem globálisan az összessel, ami a pályán van.
4: Szerintem huszadrangú részletkérdés, hogy egy akárhogyan (Arduino, astabil multivibrátor) előállított PWM jelet mivel viszünk fel a sínre. Ez akár egyetlen tranzisztor és egy átkapcsoló is lehet, vagy H-híd is.
5: Flöcsy kollégának szerintem két útja van. Pro primo: hagyja az egész PWM vezérlést 100-200Hz körül, és nem vesz tudomást a zúgásról. Ettől baja senkinek nem lesz, és a modellek 99%-a jól fog viselkedni vele a pályán. Pro secundo: áttér DCC digitális rendszerre. |
|
(#57829) csíkosháTTú válasza etwg hozzászólására (#57818)
|
Válasz •
|
Nov 30, 2017 |
|
Idézet:
„But faster-clocked (higher-frequency) PWM has advantages. First, it keeps the motor’s armature saturated with current, which is both more efficient and produces less waste heat in the motor. For the typical motors I’ll use, frequencies “significantly above” 12 kHz are a good idea (12 kHz is the frequency derived from the time constant of the motor). Second, PWM will cause the motor to vibrate, and higher frequencies are harder to hear, and thus less distracting. That first point is particularly important for coreless motors, used in some model trains, as heating with low-frequency PWM can destroy the motor. Motor manufacturers often suggest that 20 kHz is a good frequency (significantly higher and you start to get into inefficiency from switching losses in the circuitry producing the PWM signal).”
Csak azért idéztem ide, mert belefájdult a fejem. Mindjárt megyek is egy Wernesgrüner-ért... 
A PWM jel csak akkor nyírja ki a motort, ha nagyobb a csúcsfeszültsége, mint a motor névleges maximuma. Ha nagy a mechanikus terhelés a motoron, akkor előbb-utóbb a sima DC is kinyírja, nem kell hozzá PWM... |
|
(#57839) flocsy válasza csíkosháTTú hozzászólására (#57828)
|
Válasz •
|
Dec 1, 2017 |
|
Bocs, csíkosháTTú, de én szeretem a kihívásokat, a vélt vagy valós probléma kiirtása maga az élmény, a végén a játék az Inglenookkal már csak a hab lesz a tortán
Ez a PID szabályozás jól hangzik. Ami még hiányzik nekem az a visszacsatolás: mit, mivel, hol és hogyan kéne mérni?
Arduino \
H-híd - sín
12V táp /
Én nem is annyira a zúgást szeretném eltüntetni vele, mint inkább csökkenteni a lehetséges lassúmenet sebességét. Mivel az Inglenook játék részeként a mozdony lehet egyedül de akár húzhat 5 kocsit is, ezért logikusnak hangzik, hogy a minimális mozgáshoz szükséges PWM-et dinamikusan változtassam (külön kérdés, hogy azt mivel érjük el, csak a kitöltési tényező változtatásával, vagy esetleg azzal is, hogy különböző sebességnél változtatjuk a frekvenciát is).
Zárojeles megjegyzés:
Nekem egyszerre mindig csak egy mozdony lesz az Inglenookon. A további diskurzus szempontjából tegyük fel, hogy csak egy konkrét mozdony van (a valóságban lesz 2-3 de egy adott napon csak egy lesz elővéve és ha tudom hogy kell belőni a rendszer konstansait az egyik mozdonyhoz, akkor már meg fogom tudni csinálni több mozdonyra is és egy mikrokapcsolóval kiválaszthatóvá tenni melyik mozdonyt raktam fel, ez már csak programozás kérdése) |
|
(#57840) etwg válasza flocsy hozzászólására (#57839)
|
Válasz •
|
Dec 1, 2017 |
|
Ha megnézed az L298-s adatlapját, ott van alul a current sense kimenet, ahova beköthetsz egy kis ellenállást, amin mérheted a felvett áramot. Ebböl már csinálhatsz magadnak jelet a visszacsatolásra - azaz a PWM változtatására. Persze az aligha fog müködni magas frekin, mert az integrálodik a motoron ( induktiv terhelés), igy késleltetve jelenik meg az AVR bemenetén. Szoval ezen el kell még töprengened.
Olvasd el a belarakott honlap többi oldalát is - föleg a tápok tesztjeit. Sokat lehet abbol tanulni. Ott van kettö ( ha jol emlékszem) amiknek van visszacsatolása.
Még valamit. Ugyanaza a technika nem müködik, nem müködhet, ha a motor a sineken kapja a PWM jelet, azaz a DCC egész más eljárárasokat használ mint ami neked kell. (Ott a motor direkt a dekodérhez van kötve pár cm hosszu drottal a mozdonyban, a te esetebne meg ott van a sinrendszer az áramszedés stb. ami égészen más környezetet alkot igy a PWM-nek is másképp kell müködnie. |
|
(#57844) myibit73 hozzászólása
|
Válasz •
|
Dec 1, 2017 |
|
Üdv mindenkinek!
A kisfiam kedvéért kb. 25évs kihagyás után újta belefogtam a terepasztal építésbe.
Van néhány alkatrész ami számomra nem ismert ebben szeretnék segítséget kérni.
Mire jó és hogyan kell bekötni? |
|
|
|
(#57845) piltdownman válasza HarciSün hozzászólására (#57809)
|
Válasz •
|
Dec 2, 2017 |
|
Nyilván akkor érdemes a kimeneteket is összekötni, ha az egyik motor pl.0,5A-t, a másik 1,5A-t
eszik, mivel a kimenetek külön-külön 1-1A-t tudnak.
|
|
(#57846) piltdownman válasza etwg hozzászólására (#57813)
|
Válasz •
|
Dec 2, 2017 |
|
Ez a Texas adatlap az előzőtől eltérően jó, nincs ott a Leiter Jakab.
Nem látom, mi baj van a könyveimmel.
A hivatkozott 6. ábrán egy bipoláris léptető(!) motor áramstabilizálás nélküli meghajtását mutatja.
Itt szó sincs PWM-ről, ezeket a motorokat a „Control A” ill.„B” bemeneteken 50% kitöltésű,
90fokkal eltolt jelek vezérlik, az áramirányváltásról a külső inverterek gondoskodnak, a fordulat-
számot a vezérlő jel frekvenciája határozza meg.
Ezt írtam:
Idézet:
„DC motor meghajtásánál nincs különbség, hogy az IN-ekre, vagy a ENA-ra megy a PWM,
nyilván uC használata esetén a két vezetékes az egyszerűbb.”
Ez vonatkozik az összes L293 ill. az L298 áramkörre, ahogy alább lerajzoltam. Itt egy fillérekből
összerakható, zárlatvédett áramkör is. A kapcsolók és a pot.méter helyett lehet Arduinoról hajtani.
Harcisün! Nem lehet hogy szabadon hagytál egy bemenetet, azért nem működött a IN-re adott
PWM-re?
|
|
|
|
(#57847) piltdownman válasza flocsy hozzászólására (#57816)
|
Válasz •
|
Dec 2, 2017 |
|
Idézet:
„De akkor a későbbi hozzászólásod alapján jól értem, hogy annyira nem gáz, és használhatók ezek? Igaz ez a legolcsóbb kínai áru amit a neten leltem...”
De, gáz. Az L29x -t meg kell patkolni egy áramkorláttal,vagy valamilyen TLE 5206-2 szerű á.k.-t kell használni. |
|
(#57848) diginewl hozzászólása
|
Válasz •
|
Dec 2, 2017 |
|
Kicsit más tészta.
Nálam még mindig az is471F "projekt" fut, ami most zárul. Ezzel a nagyobb smd infra leddel biztos a jelzés - köszönet a kínai rokonoknak
A videón látható IS471F újabb, hogy a két halogén lámpa együtt zavarja, de ahhoz tényleg egyszerre egy irányba kell világítaniuk.
Így hurokmodul szakaszhatárhoz, foglaltság érzékeléshez szerintem jó lett. Két talpfa közé még utólag is beépíthető, kevéssé zavaró.
|
|
(#57849) etwg válasza myibit73 hozzászólására (#57844)
|
Válasz •
|
Dec 2, 2017 |
|
Ez nem valami ROCO elosztotégla. Nincs a hátulján valamilyen szám? |
|
(#57850) etwg válasza piltdownman hozzászólására (#57846)
|
Válasz •
|
Dec 2, 2017 |
|
Lehet, hogy eldumálunk egymás mellett. Ezen a rajzon mezei DC motor van hiddal és áramszenzorral.
|
|
|
|
(#57851) maya711 hozzászólása
|
Válasz •
|
Dec 2, 2017 |
|
Bocsánat az OFF-ért, de azért nagyjából ide tartozhat a kérésem.
Megvan esetleg valakinek az "mtb-model" által gyártott MP1 állítómű BELSŐ kapcsolása?
Mostanában készítettem váltó-dekódert a TILLIG 86112 állítóműhöz. Amennyiben ez alkalmas lenne az MP1-hez is, akkor inkább azt használnám: olcsóbb is és kisebb is. De a használhatóság eldöntéséhez az MP1 kapcsolására lenne szükségem.
És még valami: hol lehetne beszerezni dia 0,3mm-es rugóacél huzalt? A 86112-höz és az MP1-hez kínált 0,6-os túlságosan merev!
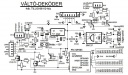
Köszönetképpen iderakom az említett váltó-dekóder kapcsolását bárki számára: |
|
|
|
(#57852) etwg válasza maya711 hozzászólására (#57851)
|
Válasz •
|
Dec 2, 2017 |
|
Nem adja ki az MTB - már többször beszéltem velük, inkább kicserélték ( az általam véletlenül) tönkretett MP1-t.
De valojában számodra felesleges a belsö kapcsolása, mert a bemenetet addig kell 0V-ra huzni mig belül a mikrokapcsolo szét nem bontja az áramkört. Ilyenkor a másik bemenet lesz élö.
Rugoacélt meg gitáros barátodtol ingyen is kapsz - a két vékonyabb hur ilyen. |
|
|
| |
2026. Máj, 24. Vas
12:57:11 |
| |
Jelenleg 6 fő olvassa az oldalt |
|
|